Страница изменена 24.04.02
Аппаратура
РЛС ПВО
автоматизации
- Зона обнаружения многозвенная, длина одного звена системы 20 - 50 км
- Поперечный размер барьера зоны 1,5-8 км
- Высота зоны чувствительности 0 - 4-7 км
- Вероятность обнаруженния (при вероятности ЛТ 1 в 72 часа) 0,8-0,9
- Мощность излучения 1-5 вт
- Темп выдачи информации 0,25 сек
- Ресурс 40000 час
- Обслукживающий персонал 1 чел
- Масса однозвенного комплекта 7 т
Подробнее"Газетчик-Е"
Предназначен для защиты РЛС от противорадиолокационных ракет (ПРР) методом кратковременного выключения их излучения по командам автономного обнаружителя ПРР, а также для использования отвлекающих устройств и постановки помех системам наведения ПРР с тепловыми, телевизионными и активными радиолокационными системами самонаведения.
Защищаемый сектор пространства: - по азимуту 360°
- по углу места до 90°
Составные части средств защиты "Газетчик": автономный обнаружитель; отвлекающие устройства в частотном диапазоне защищаемой РЛС; средство постановки аэрозольных и дипольных помех; блок сопряжения с защищаемыми РЛС.
Предусмотрены различные варианты комплектации средств защиты. Боевая работа средств защиты осуществляется в автоматическом режиме. Электропитание - от защищаемой РЛС.
ПодробнееРЛС "Гамма-ДЕ"
 Подвижная трехкоординатная станция с фазированной антенной решеткой в твердотельном исполнении, предназначенная для применения в автоматизированных и неавтоматизированных системах управления ПВО и ВВС. Может также использоваться в качестве трассового радара для управления воздушным движением (УВД).
Подвижная трехкоординатная станция с фазированной антенной решеткой в твердотельном исполнении, предназначенная для применения в автоматизированных и неавтоматизированных системах управления ПВО и ВВС. Может также использоваться в качестве трассового радара для управления воздушным движением (УВД).
РЛС дециметрового диапазона обеспечивает обнаружение и сопровождение широкого класса современных воздушных целей, включая высотные малозаметные авиационные ракеты, условиях сильного электронного противодействия и естественных помех.
В состав РЛС входят: фазированная антенная решетка, на поворотном устройстве; аппаратура обработки, управления, отображения и передачи данных: наземный радиозапросчик; электростанция; запасное имущество и принадлежности, контрольно-измерительная аппаратура. - Диапазон частот дециметровый
- Зона обнаружения целей: по дальности 10-360 км, по высоте 30; 60 км, по азимуту 360 град., по углу места 30; 45 град.
- Дальность обнаружения цели с ЭПР 2 кв.м 315, 330 км
- Период обновления информации10 с
- Коэффициент подавления отражений от местных предметов 45 дБ
- Наработка на отказ 200-300 ч
- Среднее время восстановления 0,5 ч
- Время включения1,5 мин.
- Время развертывания (свертывания) 1,5 ч
- Обслуживающий персонал 5 чел.
- Количество транспортных единиц 5
Подробнее"Гамма-С1Е"
 РЛС предназначенная для применения в автоматизированных системах управления ПВО и ВВС, в неавтоматизированных подразделениях, для сил быстрого реагирования. Может использоваться для выдачи информации на автоматизированные посты управления и контроля воздушного движения самолетов гражданской авиации.
РЛС предназначенная для применения в автоматизированных системах управления ПВО и ВВС, в неавтоматизированных подразделениях, для сил быстрого реагирования. Может использоваться для выдачи информации на автоматизированные посты управления и контроля воздушного движения самолетов гражданской авиации.
Мобильная РЛС обнаружения, наведения и целеуказания боевого режима с фазированной антенной решеткой "Гамма-С1Е" обнаруживает и сопровождает широкий класс современных и перспективных воздушных целей, включая авиационные ракеты, в условиях воздействия естественных и преднамеренных помех.
В состав станции входят: машина М1 с антенно-поворотным устройством, приемно-передающей аппаратурой и встроенным наземным радиозапросчиком; машина М2 с аппаратурой управления, обработки, отображения и передачи данных; машина МЗ с запасным имуществом и принадлежностями, контрольно-измерительной аппаратурой и кабельными укладками; система энергоснабжения в прицепах, буксируемых машинами М1 и М2.
Предусмотрена комплектация РЛС выносной аппаратурой, состоящей из четырех рабочих мест оператора, размещаемой на удалении до 1 км с передачей сигналов и информации по волоконно-оптической линии связи и до 15 км при использовании радиолинии.
"Гамма-С1Е" является перспективной РЛС. Выгодно отличается высокими энергетическим потенциалом и помехозащищенностью, высокой степенью автоматизации процессов обнаружения, измерения, управления и контроля работы станции.
ПодробнееРЛС программного обзора 9С19М2 "Имбирь"
 РЛС программного обзора 9С19М2 "Имбирь" представляла собой трехкоординатную когерентно-импульсную РЛС сантиметрового диапазона с высоким энергетическим потенциалом, электронным управлением лучом в двух плоскостях и высокой пропускной способностью.
РЛС программного обзора 9С19М2 "Имбирь" представляла собой трехкоординатную когерентно-импульсную РЛС сантиметрового диапазона с высоким энергетическим потенциалом, электронным управлением лучом в двух плоскостях и высокой пропускной способностью.
Электронное сканирование луча в двух плоскостях позволяло в процессе регулярного обзора быстро обеспечивать анализ секторов целеуказания с КП системы или циклические с высоким темпом (1-2 секунды) обращения к обнаруженным отметкам с целью завязки их в трассы и сопровождение трасс высокоскоростных целей.
Использование в станции узкого луча антенны (порядка 0,5 град.), зондирующих сигналов с линейной частотной модуляцией и с большим коэффициентом сжатия обеспечивало малый импульсный объем, что в сочетании с цифровой системой череспериодной компенсации, схемой автоматической компенсации скорости ветра (дипольных помех) и электронным сканированием позволяло обеспечивать высокую защищенность РЛС программного обзора от воздействия пассивных помех.
Высокий энергетический потенциал, достигнутый за счет использования в передающем устройстве мощного усилительного клистрона, в сочетании с применявшимися электронным сканированием луча антенны и цифровой обработкой принятых сигналов обеспечивал хорошую защищенность от активных шумовых помех. В РЛС программного обзора было реализовано несколько режимов обзора. Один из режимов обеспечивал обнаружение и сопровождение головной части БР типа "Першинг". В этом режиме зона обзора составляла +/-45 град. по азимуту, 26 град.- 75 град. по углу места и 75-175 км по дальности. При этом угол наклона норма ли к поверхности ФАР относительно горизонта составлял 35 град. Время обзора указанного сектора поиска с учетом сопровождения двух трасс целей составляло 12,5-14 секунд. Максимальное количество сопровождаемых трасс - 16. Ежесекундно координаты и параметры движения цели передавались на КП системы.
Во втором режиме обеспечивалось обнаружение и сопровождение авиационных БР типа SRAM и крылатых ракет с баллистическим и аэробаллистическим стартом. Зона обзора составляла +/-30 град. по азимуту, 9 град.- 50 град. по углу места и 20-175 км по дальности. Параметры движения целей с частотой 0,5 Гц передавались на КП 9С457.
В третьем режиме осуществлялись обнаружение и сопровождение аэродинамических целей, а также пеленгация (при возможности и дальнометрия) постановщиков помех на расстояниях до 100 км. При этом зона обзора составляла +/-30 град. по азимуту, 0 град. - 50 град. по углу места и 20-175 км по дальности при угле наклона нормали ФАР к горизонту, равном 15 град.. Направление обзора задавалось по телекодовой линии связи с КП системы или оператором станции.
При регулярном обзоре зоны поступившее целеуказание с КП системы автоматически прерывало обзор, а после отработки ЦУ обзор возобновлялся. Темп обновления информации зависел от размеров установленной зоны поиска, а также от помеховой обстановки и мог изменяться от 0,3 до 16 секунд. Координаты обнаруженных целей передавались на КП. Среднеквадратичные ошибки измерения координат целей не превышали 70 м по дальности, 15 мин. по азимуту, 12 мин. по углу места.
Аппаратура РЛС была размещен на на гусеничном самоходе "объект 832".
Масса станции - 44 т. Расчет - 4 человека.
ПодробнееРЛ комплекс Кабина-66
Радиолокационный комплекс большой дальности. Предназначен для обнаружения и сопровождения воздушныйх целей на средних, больших и малых высотах (за счет наличия специального режима) и наведения на них авиации ПВО. Модернизация П-80.
Состав: Дальномеры - 2 шт, Кабина технического поста с аппаратурой обработки информации, Модуляторные кабины - 2 шт, Кабины с индикаторной аппаратурой, Радиовысотомеры - 2 или 4 шт, Кабины ЗИП.
"Кабина 66" - комплекс боевого режима, обладает высокими тактическими возможностями по обнаружению практически всех типов самолетов, в том числе и КР в условиях интенсивных активных помех на фоне отражений от земли. Комплекс может иметь систему защиты от противорадиолокационных ракет.
Комплекс выдает потребителям 3 координаты цели (азимут, дальность, высота).
РЛК был принят на вооружение Советской Армии в 60-ых годах.
Комплекс состоит на вооружении сил ПВО Югославии и принимал участие в отражении атак авиации НАТО в 1999 г.
Зарубежные аналоги: S-600, Великобритания, S-654, Великобритания, AN/TPS-63, США
ПодробнееМобильная твердотельная автоматизированная РЛС "КАСТА-2Е2" (39Н6Е)
 РЛС предназначена для обнаружения, измерения координат и автоматического сопровождения с выдачей трассовых характеристик самолетов, летящих и зависающих вертолетов, дистанционно пилотируемых аппаратов и крылатых ракет, в том числе летящих на малых и предельно малых высотах на фоне интенсивных отражений от подстилающей поверхности, местных предметов и метеообразований. РЛС способна обнаруживать цели, выполненные с применением технологии "Стелс", а также движущиеся объекты на поверхности моря.
РЛС предназначена для обнаружения, измерения координат и автоматического сопровождения с выдачей трассовых характеристик самолетов, летящих и зависающих вертолетов, дистанционно пилотируемых аппаратов и крылатых ракет, в том числе летящих на малых и предельно малых высотах на фоне интенсивных отражений от подстилающей поверхности, местных предметов и метеообразований. РЛС способна обнаруживать цели, выполненные с применением технологии "Стелс", а также движущиеся объекты на поверхности моря.
ТТХ: - Пределы работы: по дальности 5-150 км, по азимуту 360 град, по углу места 25 град, по высоте 10-6000 м
- Дальность обнаружения воздушных объектов, летящих на высотае 100 м 55 км, на высоте 1000 м - 95 км
- Коэффициент подавления отражений от местных предметов 54 дБ
- Продолжительность непрерывной работы - не менее 20 суток
- Время включения - не более 3,3 мин
- Изготовитель - Муромский завод радиоизмерительных приборов ( МЗРИП).
РЛС состоит из аппаратной машины, антенной машины, электростанции, смонтированных на трех автомобилях повышенной проходимости КамАЗ-4310. Предусмотрено выносное рабочее место оператора, устанавливаемое на расстоянии до 300 метров от станции. Антенна может быть установлена на легкой перевозимой высотной опоре высотой 50 м, что увеличивает дальность обнаружения низколетящих целей.
Подробнее
ПодробнееМобильная твердотельная РЛС "КАСТА-2Е1" (51У6)
Предназначена для контроля воздушного пространства, определения дальности и азимута малоразмерных воздушных объектов - самолетов, вертолетов, дистанционно-пилотируемых летательных аппаратов и крылатых ракет, летящих на малых и предельно малых высотах, на фоне интенсивных отражений от подстилающей поверхности, местных предметов и гидрометеообразований.
ПодробнееРЛС 5Н88 "Машук"
 3-х координатная боевого режима. Изготовлена в одном экземпляре, в войска не поставлялась
Подробнее
3-х координатная боевого режима. Изготовлена в одном экземпляре, в войска не поставлялась
Подробнее
РЛС П-35
 Двухкоординатная РЛС кругового обзора (дальномер)использовалась в Войсках ПВО страны, в ВВС, в частях ПВО ВМФ и в радиотехнических формированиях войск ПВО СВ как модернизация П-30. В отличие от П-30 в П-35 верхнее антенное зеркало было установлено горизонтально с некоторым наклоном в угломестной плоскости, имевшийся один дециметровый канал заменен сантиметровым.
Двухкоординатная РЛС кругового обзора (дальномер)использовалась в Войсках ПВО страны, в ВВС, в частях ПВО ВМФ и в радиотехнических формированиях войск ПВО СВ как модернизация П-30. В отличие от П-30 в П-35 верхнее антенное зеркало было установлено горизонтально с некоторым наклоном в угломестной плоскости, имевшийся один дециметровый канал заменен сантиметровым.
Модернизация РЛС П-35 - П-35М отличалась от предшественника измененной конструкцией зеркал антенн, увеличением пределов и скоростей наклона этих зеркал. С целью защиты РЛС П-35М от пассивных помех и метеофакторов, а также обеспечения обнаружения и проводки целей на малых высотах (50-300 м) в ближней зоне была разработана модификация этой станции с названием "Меч-35".
Подробнее
УпоминаниеРЛС П-37 (1РЛ139)
 Радиодальномер
Радиодальномер
Упоминание
РЛС обнаружения и целеуказания П-40 "Броня"
 Аппаратура станции размещалась на двух самоходных шасси: дальномер П-40Д - на гусеничном самоходе. Предусматривалась работа дальномера с двумя высотомерами. Высотомер ПРВ-9А располагался на автомобиле "Урал-375А" или на КРАЗ-255. Дальномер использовался в качестве станции обнаружения и целеуказания 1С12 зенитного ракетного дивизиона "Круг".
Аппаратура станции размещалась на двух самоходных шасси: дальномер П-40Д - на гусеничном самоходе. Предусматривалась работа дальномера с двумя высотомерами. Высотомер ПРВ-9А располагался на автомобиле "Урал-375А" или на КРАЗ-255. Дальномер использовался в качестве станции обнаружения и целеуказания 1С12 зенитного ракетного дивизиона "Круг".
Дальномер обеспечивал обнаружение самолета-истребителя на дальностях 70 км при высоте полета цели 500 м, 150 км при высоте 6 км и 180 км при высоте 12 км. Импульсная мощность станции составляла 1,7-1,8 МВт, чувствительность приемника - 4,3-7,7х10'14 Вт. Антенная система дальномера при круговом обзоре последовательно формировала в угломестной плоскости четыре луча: два нижних - примерно 2 и 4°, два верхних - примерно 10 и 14° (последний косеканс-квадратной формы). Питание его и сопряженного с ним высотомера ПРВ-9А осуществлялось от встроенного в дальномер газотурбинного агрегата электропитания.
В 1963 г. РЛС П-40 была принята на вооружение войск ПВО СВ. В 1965 г. ее модификация 1С12 была принята на вооружение в качестве РЛС обнаружения ЗРК "Круг".
В период 1966-1968 гг. дальномер был модернизирован. Испытания модернизированного образца, показали, что дальности обнаружения станции возросли на указанных выше высотах до 85, 220 и 230 км соответственно, станция стала защищенной от ПРР типа "Шрайк", повысилась ее надежность. Подробнее
РЛС П-80 "Алтай"
3-х координатный ламповый РЛК боевого режима. Производился с середины 50-х ггРадиовысотомер ПРВ-9А "Наклон-2Б"
В 1960 г. в ОКБ-588 МГСНХ совместно с НИИ-208 ГКРЭ была начата разработка автомобильного варианта высотомера - ПРВ-9А (главный конструктор высотомера Л. И. Шульман) как составной части мобильной РЛС обнаружения (дальномера) "Броня" - П-40Д, 1РЛ128Д. ПРВ-9А в отличие от ПРВ-9 имел общий с дальномером источник электропитания (газотурбинный агрегат питания дальномера). Радиовысотомер ПРВ-9А ("Наклон-2Б") имел также возможность сопрягаться с другими РЛС кругового обзора. Высотомер ПРВ-9А в 1962 г. проходил государственные испытания в составе РЛС "Броня" на Донгузском полигоне ибыл принят на вооружение. ПодробнееРадиовысотомер ПРВ-16
Создан на базе серийного высотомера ПРВ-9. Главным конструктором этой разработки был В. А. Кравчук. В 1970 г. были проведены полигонные испытания ПРВ-16, после которых он был принят на вооружение. В отличие от ПРВ-9 и ПРВ-9А этот высотомер имел аппаратуру защиты от ПРР, аппаратуру пеленгования одиночного самолета-постановщика шумовой помехи, сигнализацию неисправностей аппаратуры высотомера, обеспечивал работу при отрицательных углах места (до -1,5°). ПодробнееУниверсальная, мобильная, трехкоординатная РЛС пятого поколения "Противник-ГЕ"
 Универсальная, мобильная, трехкоординатная РЛС пятого поколения "Противник-ГЕ", может сопровождать до 150 воздушных объектов. Локатор способен в условиях интенсивного радиопротиводействия выдавать информацию одновременно для наведения истребителей и целеуказания зенитным ракетным дивизионам. Обзор по высоте на 200 км. Станция "заглядывает" в ближний космос и может наблюдать летательные аппараты на предельно малых высотах, ракеты и спутники при запуске их на низких орбитах.
Универсальная, мобильная, трехкоординатная РЛС пятого поколения "Противник-ГЕ", может сопровождать до 150 воздушных объектов. Локатор способен в условиях интенсивного радиопротиводействия выдавать информацию одновременно для наведения истребителей и целеуказания зенитным ракетным дивизионам. Обзор по высоте на 200 км. Станция "заглядывает" в ближний космос и может наблюдать летательные аппараты на предельно малых высотах, ракеты и спутники при запуске их на низких орбитах.
ФАР размером 5,5x8,5 метра с цифровой пространственно-временной обработкой сигнала формирует диаграмму направленности в секторе от 0 до 45 градусов и автоматически обеспечивает высокую защищенность локатора от активных шумовых помех. ФАР создает 20 одинаковых лучей, которые формируются в 10 блоках, в каждом по 2 канала
"Противник" измеряет радиальную скорость, что позволяет отсечь ложные цели.
Локатор может сопровождать до 150 воздушных объектов.
Антенна имеет две скорости вращения 6 и 12 оборотов в минуту.
Зона обнаружения, - по дальности до 400 км; - по высоте от 0,05 до 200 км
Точность определения координат: - по дальности, 50 м; - по азимуту, 10 мин.;- по углу места, 8 мин.
Дальность обнаружения цели с ЭПР менее 0,1 кв.м до 200 км.
Время работы на отказ, 1000 час.
Количество транспортных единиц - 2
Самолеты с ЭПР менее 0,1 кв. м., станция обнаруживает на дальности до 200 км.
Главный конструктор д.т.н. Михаил Лейких
Подробнее
ПодробнееРадиолокатор обнаружения (РЛО) 64Н6Е
 РЛО 64Н6Е представляет собой мобильную радиолокационную станцию обнаружения кругового обзора с двусторонней фазированной антенной решеткой (ФАР), автоматическим управлением режимами и съема данных, работающую в сантиметровом диапазоне частот. Он предназначен для обеспечения радиолокационной информацией пункта боевого управления (ПБУ) средств управления 83М6Е ЗРС С-300 ПМУ1.
РЛО 64Н6Е представляет собой мобильную радиолокационную станцию обнаружения кругового обзора с двусторонней фазированной антенной решеткой (ФАР), автоматическим управлением режимами и съема данных, работающую в сантиметровом диапазоне частот. Он предназначен для обеспечения радиолокационной информацией пункта боевого управления (ПБУ) средств управления 83М6Е ЗРС С-300 ПМУ1.
РЛО 64Н6Е обеспечивает обнаружение воздушных целей на дальностях с разрешающей способностью, точностью определения координат и темпом обновления данных, позволяющим ПБУ завязывать, сопровождать трассы целей как без помех, так и при воздействии активных и пассивных помех, определение государственной принадлежности обнаруженных целей, а также пеленгационных направлений на постановщики активных помех.
Электронное сканирование лучом ФАР в азимутальной и угломестной плоскостях в сочетании с быстрым переключением сторон излучения ФАР и равномерным электромеханическим вращением ФАР по азимуту позволяют программно перераспределять излучаемую энергию в отдельных направлениях и секторах зоны обзора за счет изменения временных затрат на обзор различных участков пространства в зависимости от радиолокационной обстановки, разделить зону видимости РЛО по углу места на зону регулярного обзора и зону сопровождения, оптимизировать временные затраты РЛО за счет использования двухэтапных процедур обнаружения в комбинации с режимом селекции движущихся целей (СДЦ). Границы действия СДЦ устанавливаются по высоте и дальности оператором РЛО или автоматически.
Защита от активных прицельных помех обеспечивается автоматической перестройкой несущей частоты по результатам анализа помеховой обстановки. Для защиты от активных заградительных помех, действующих по боковым лепесткам диаграммы направленности (ДН) ФАР, используется трехканальный автокомпенсатор, подключенный к компенсационным антеннам с остронаправленными ДН. В РЛО пеленгуются помехопостановщики.
Защита от пассивных помех производится за счет использования аппаратуры СДЦ. Для уменьшения количества ложных отметок в ближней зоне (до 65 км) в канале обнаружения применена временная автоматическая регулировка усиления (ВАРУ), в дальней зоне - схема стабилизации уровня ложных тревог (СУЛТ). Для уменьшения количества ложных отметок от предметов на местности и малоподвижных целей применено межобзорное бланкирование сигналов, полученных из одного и того же участка пространства в течение нескольких периодов обзора.
Управление работой РЛО и входящих в него устройств, обработка радиолокационной информации и определение координат целей осуществляется вычислительным устройством, построенным на базе двух специализированных ЭВМ.
Основные технические характеристики - Диапазон S
- Зона обнаружения по азимуту 360 град, по углу места: регулярный обзор 13,4 град, сопровождение 55 град, в специальном секторе до 75 град;
- Дальность обнаружения аэродинамических целей типа МиГ-21, км 260
- Точность определения координат по дальности 200 м, по азимуту 30 мин, по углу места 35 мин;
- Период обзора при регулярном обзоре 12 с, при сопровождении целей 6, 12 с
- Количество целей, координаты которых выдаются потребителю за каждый обзор 200
- Время готовности с марша и время свертывания 5 мин
Встроенная система контроля проверяет функционирование аппаратуры и определяет неисправности.
В состав РЛО входят средства речевой связи, а также широкополосная линия связи 5Я312Е для передачи информации на ПБУ по радиоканалу или по кабелю. РЛО укомплектован средствами автономного электроснабжения, в состав которых входит газотурбинный агрегат, вырабатывающий электроэнергию трехфазного переменного тока частотой 400 Гц напряжением 220 В. В качестве придаваемых средств внешнего электропитания могут быть использованы распределительно-преобразовательное устройство (РПУ) 63Т6А и дизельная электростанция (ДЭС) 5И57А.
Аппаратура РЛО размещена в двух контейнерах Ф6Е (ФАР, передающее и приемное устройства) и Ф8Е (устройства помехозащиты, обработки информации и управления), устанавливаемых на автопоезде (тягач 74106, полуприцеп 9988). РЛО обслуживается боевым расчетом из 4 человек. Его масса - 60 т.
Подробнее
ПодробнееРЛС ЗРК "Оса"
 Размещенная на боевой машине 9А33Б радиолокационная станция обнаружения целей представляла собой когерентно-импульсную РЛС кругового обзора сантиметрового диапазона со стабилизированной в горизонтальной плоскости антенной, что позволяло производить поиск и обнаружение целей при движении комплекса. РЛС осуществляла круговой поиск вращением антенны со скоростью 33 об./мин, а по углу места - пререброской луча в одно из трех положений при каждом обороте антенны. При импульсной мощности излучения 250 кВт, чувствительности приемника порядка 10Е-13 Вт, ширине луча по азимуту 1°, по углу места - от 4° в двух нижних положения луча и до 19° в верхнем положении (общий сектор обзора по углу места составлял 27°) станция обнаруживала истребитель на дальности 40 км при высоте полета 5000 м (27 км - на высоте 50 м). Станция была хорошо защищена от активных и пассивных помех.
Установленная на боевой машине РЛС сопровождения цели сантиметрового диапазона волн при импульсной мощности излучения 200 кВт, чувствительности приемника 2x10Е-13 Bт и ширине луча 1° обеспечивала захват цели на автосопровождение на дальности 23 км при высоте полета 5000 ми 14 км при высоте полета 50 м. СКО автосопровождения цели составляли 0,3 д.у. по угловым координатам и 3 м по дальности. Станция имела систему селекции движущихся целей и различные средства защиты от активных помех. При сильных активных помехах возможно сопровождение с помощью телевизионно-оптического визира и РЛС обнаружения.
Размещенная на боевой машине 9А33Б радиолокационная станция обнаружения целей представляла собой когерентно-импульсную РЛС кругового обзора сантиметрового диапазона со стабилизированной в горизонтальной плоскости антенной, что позволяло производить поиск и обнаружение целей при движении комплекса. РЛС осуществляла круговой поиск вращением антенны со скоростью 33 об./мин, а по углу места - пререброской луча в одно из трех положений при каждом обороте антенны. При импульсной мощности излучения 250 кВт, чувствительности приемника порядка 10Е-13 Вт, ширине луча по азимуту 1°, по углу места - от 4° в двух нижних положения луча и до 19° в верхнем положении (общий сектор обзора по углу места составлял 27°) станция обнаруживала истребитель на дальности 40 км при высоте полета 5000 м (27 км - на высоте 50 м). Станция была хорошо защищена от активных и пассивных помех.
Установленная на боевой машине РЛС сопровождения цели сантиметрового диапазона волн при импульсной мощности излучения 200 кВт, чувствительности приемника 2x10Е-13 Bт и ширине луча 1° обеспечивала захват цели на автосопровождение на дальности 23 км при высоте полета 5000 ми 14 км при высоте полета 50 м. СКО автосопровождения цели составляли 0,3 д.у. по угловым координатам и 3 м по дальности. Станция имела систему селекции движущихся целей и различные средства защиты от активных помех. При сильных активных помехах возможно сопровождение с помощью телевизионно-оптического визира и РЛС обнаружения.
В отличие от ЗРК "Круг", в системе радиокомандного наведения комплекса "Оса" применялись два комплекта антенн широкого и среднего лучей для захвата и ввода в луч станции сопровождения цели двух ЗУР при пуске с минимальным интервалом (3-5 с). В дополнение к применяемым в ЗРК "Круг" етодам наведения в комплексе "Оса" при стрельбе по низколетящим целям (на высотах 50-100 м) использовался метод "горки", обеспечивающий подлет ЗУР к цели сверху, что позволяло снизить ошибки выведения ракеты на цель, исключив срабатывание радиовзрывателя от земли.
Серийное производство боевой машины 9А33Б ЗРК "Оса" было организовано на Ижевском электромеханическом заводе МРП,
В ракете ЗРК "Оса-АК" был доработан радиовзрыватель путем введения в него двухканального приемника с автономной схемой анализа высоты в момент взведения, что обеспечило несрабатывание РВ от земли на высоте до 27 м.
В РЛС ЗРК "Оса-АКМ" способ сопровождения цели радиолокационный и с помощью телевизионно-оптического визира. Зона обнаружения по дальности 1,5-30 км, по высоте 10-5000 м. Скорость цели до 500 м/c
Подробнее
ПодробнееМобильная многофункциональная трехкоординатная обзорная РЛС 96Л6Е
 Мобильная многофункциональная трехкоординатная обзорная РЛС АСЦУ (автономное средство целеуказания) предназначена для обнаружения, определения государственной принадлежности, классификации и сопровождения воздушных целей в составе систем ПВО С-300ПМУ, С-300ПМУ1, С-300ПМУ2.
Мобильная многофункциональная трехкоординатная обзорная РЛС АСЦУ (автономное средство целеуказания) предназначена для обнаружения, определения государственной принадлежности, классификации и сопровождения воздушных целей в составе систем ПВО С-300ПМУ, С-300ПМУ1, С-300ПМУ2.
РЛС разработана в КБ "Лира", производится на Лианозовском электромеханическом заводе.
Состав РЛС: Колесное шасси высокой проходимости на базе автомобиля МАЗ-7930, Антенный пост с ФАР, Аппаратная кабина, Газотурбинный агрегат питания,
РЛС используется в составе систем ПВО С-300ПМУ, С-300ПМУ1, С-300ПМУ2, в которых служит в качестве маловысотного обнаружителя, обзорного радиолокатора и командного пункта, а также как источник радиолокационной информации для автоматизированных и неавтоматизированных систем управления. Радиолокационная информацией передается потребителям по кабелю и/или радиоканалу. Адаптивные виды излучения, обзор пространства и специальные методы обработки отраженных сигналов, примененные в РЛС, гарантируют высокую эффективность в среде электронных помех и малую вероятность ошибок. Радар имеет высокую степень автоматизации боевого процесса, которая обеспечивает непрерывное управление всеми компонентами и фактически непрерывное документирование воздушной обстановки и параметров РЛС в течении времени. Антенная система может быть помещена на универсальную вышку 40В6М (40В6МД).
Оснвоные ТТХ: - Диапазон частот -сантиметровый
- Зона обнаружения и сопровождения по дальности 300 км, по азимуту 360 град, по уголу места, град от -3 до 70 град
- Скорость целей, м/с от 30 до 2750
- Уровень подавления помех от подстилающей поверхности, до 70 дБ
- Количество автоматически сопровождаемых целей до 100
- Время готовности ( с марша ) менее 15 мин
ПодробнееРЛС кругового обзора 9С15МТЗ ЗРС С- 300В
 РЛС КО 9С15МТЗ предназначена для обнаружения и опознавания государственной принадлежности аэродинамических целей, а также обнаружения тактических баллистических и крылатых ракет и выдачи информации о них на командный пункт (КП) ЗРС С-300В или на пункты обработки радиолокационной информации автоматизированных систем управления ПВО.
РЛС КО 9С15МТЗ предназначена для обнаружения и опознавания государственной принадлежности аэродинамических целей, а также обнаружения тактических баллистических и крылатых ракет и выдачи информации о них на командный пункт (КП) ЗРС С-300В или на пункты обработки радиолокационной информации автоматизированных систем управления ПВО.
Это мобильный трехкоординатный высокопроизводительный когерентно- импульсный радиолокатор кругового обзора с программным электронным управлением лучом (1,5х1,5 град.) в угломестной плоскости, электрогидравлическим вращением антенны по азимуту в азимутальной плоскости, работающий в сантиметровом диапазоне рабочих частот и обладающий широкими тактическими возможностями. Оптимизация зоны обнаружения в пределах инструментальной зоны обзора осуществляется за счет использования различных сочетаний длительностей зондирующих сигналов и частот их повторения, скоростей вращения антенны и управления параметрами диаграммы направленности антенны (ДНА).
РЛС КО эффективно работает в условиях воздействия естественных и организованных помех, что достигнуто за счет: - плоской волноводной решетки, имеющей низкий и быстроспадающий до уровня фона (порядка 50 дБ) уровень боковых лепестков ДНА;
- анализа интенсивности активной помехи, воздействующей на РЛС КО, и мгновенной (от периода к периоду) перестройки рабочей частоты;
- ограничения и оптимальной фильтрации эхо-сигналов;
- трехканального автокомпенсатора активных помех;
- временной автоматической регулировки усиления (ВАРУ) приемника; нелинейной схемы селекции движущихся целей (СДЦ) с автоматическим учетом скорости ветра;
- некогерентного накопления сигналов;
- бланкирования канала автоматического съема данных на отдельных направлениях зоны обзора, имеющих интенсивный уровень помех от местных предметов.
В РЛС были реализованы два режима кругового регулярного обзора воздушного пространства, используемые при обнаружении аэродинамических целей, а также БР типа "Скад" и "Ланс".
В первом режиме зона обзора станции составляла 45 град. по углу места, инструментальная дальность обнаружения - 330 км, темп обзора -12 секунд. Истребитель обнаруживался с вероятностью 0,5 на дальности 240 км. Во втором режиме зона обзора станции составляла 20 град. по углу места, инструментальная дальность -150 км, темп обзора - 6 секунд. В этом режиме для обнаружения БР была предусмотрена программа замедления вращения антенны по азимуту в секторе ПРО (в пределах 120 град.) и увеличения сектора обзора по углу места до 55 град. При этом темп обновления информации составлял 9 секунд. Во втором режиме самолет-истребитель надежно обнаруживался в пределах всей инструментальной дальности, а дальность обнаружения БР типа "Скад" составляла не менее 115 км, типа "Ланс" - не менее 95 км.
Для увеличения потенциала РЛС в отдельных направлениях, защиты ее от активных, пассивных и комбинированных помех были предусмотрены еще четыре программы замедления вращения антенны станции, которые могли быть реализованы в двух режимах регулярного обзора. При использовании этих программ темп обновления информации увеличивался на 6 секунд при размере сектора замедления, равном 30 град.
РЛС КО определяет угловые координаты (пеленги) постановщиков шумовых, заградительных помех и выдает их на КП ЗРС С-300В. Съем данных и критерийная обработка сигналов - автоматические. Вычислительное устройство на базе двух специализированных ЭВМ управляет работой РЛС КО, определяет координаты обнаруженных целей и постановщиков активных помех, формирует информацию для выдачи на КП ЗРС С-300В в соответствии с принятым в системе протоколом. Разветвленная система автоматизированного контроля функционирования аппаратуры РЛС КО осуществляет поиск и локализацию неисправностей до сменного элемента.
Основные технические характеристики - Зона обнаружения по азимуту 360 град, по углу места: по аэродинамическим целям 45 град по баллистическим целям 55 град
- Дальность обнаружения аэродинамических целей типа МиГ-21 200 км
- Разрешающая способность станции была не хуже 400 м по дальности и 1,5 град. по угловым координатам.
- Среднеквадратические ошибки определения координат целей по дальности 250 м, по азимуту 36 мин, по углу места 30 мин
- Период обзора в зависимости от заданного режима 6 - 18 с
- В режиме автосъема данных за период обзора обеспечивается выдача до 250 отметок, среди которых может быть до 200 целей.
- Время готовности с марша и время свертывания 5 мин
В состав РЛС кругового обзора входили следующие устройства: - антенна, представлявшая собой плоскую одномерную волноводную решетку с программным электрогидравлическим вращением по азимуту и электронным сканированием луча по углу места;
- передающее устройство, выполненное на лампе бегущей волны и двух амплитронах, со средней мощностью около 8 кВт:
- приемное устройство с усили-телем высокой частоты на лампе бегущей волны, обладавшее чувствительностью порядка 10Е-13 Вт;
- устройство помехозащиты;
- устройство автосъема данных;
- вычислительное устройство на базе двух специальных ЭВМ;
- аппаратура определения государственной принадлежности системы "Пароль":
- аппаратура навигации, топопривязки и ориентирования, система автономного электроснабжения;
- газотурбинный агрегат питания 220 В 400 Гц мощностью 130 кВт, резервируемый генератором отбора мощности от ходового двигателя шасси, предусмотрена возможность электропитания от внешних источников;
- аппаратура жизнеобеспечения,
- аппаратура телекодовой линией связи для передачи информации потребителям, автономной системой навигации, топопривязки и ориентирования, а также речевой линией связи с КП системы С-ЗООВ.
Все устройства и различная аппаратура РЛС кругового обзора были смонтированы на гусеничном шасси "объект 832". Масса станции - 46 т. Расчет - 4 чел.
РЛС управляется с пульта оператора на основе информации о целевой и помеховой обстановке, а также о работоспособности аппаратуры, отображаемой на экранах индикаторного устройства.
Подробнее
ПодробнееСтанция обнаружения целей ЗРК "Тор"
 Станция обнаружения целей являлась когерентно-импульсной РЛС кругового обзора сантиметрового диапазона волн с частотным управлением лучом по углу места. Луч (парциал) шириной 4° по углу места и 1,5° по азимуту мог занимать восемь положений в угломестной плоскости, перекрывая сектор в 32°. Мог производиться одновременный обзор по углу места в трех парциалах. Очередность обзора по парциалам устанавливалась специальной программой ЭВМ.
Станция обнаружения целей являлась когерентно-импульсной РЛС кругового обзора сантиметрового диапазона волн с частотным управлением лучом по углу места. Луч (парциал) шириной 4° по углу места и 1,5° по азимуту мог занимать восемь положений в угломестной плоскости, перекрывая сектор в 32°. Мог производиться одновременный обзор по углу места в трех парциалах. Очередность обзора по парциалам устанавливалась специальной программой ЭВМ.
Основной режим работы предусматривал темп обзора зоны обнаружения за 3 с, причем нижняя часть зоны просматривалась дважды. В случае необходимости можно было обеспечить обзор пространства в трех выбранных парциалах с темпом 1 с. Отметки с координатами до 24 обнаруженных целей завязывались в трассы (до десяти трасс). На индикаторе командира высвечивались цели в виде точек с характеризующими величину и направление скорости ее движения векторами, рядом с которыми отображались формуляры, содержащие номер трассы, номер цели по степени опасности (по минимальному времени вхождения в зону поражения), номер парциала, в котором находилась цель, и признак производимой операции (поиск, сопровождение и т. д.). При работе в сильных пассивных помехах для станции обнаружения целей была предусмотрена возможность бланкирования сигналов из забитого помехами направления и участка расстояния до цели. В случае необходимости имелась возможность ввести в ЭВМ координаты цели из сектора бланкирования для выработки целеуказания путем ручной накладки маркера на прикрытую помехами цель и ручного скалывания отметки.
Разрешающая способность станции обнаружения целей была не хуже 1,5°-2° по азимуту, 4° по углу места и 200 м по дальности. Максимальные ошибки определения координат цели составляли не более половины указанных величин разрешающей способности.
При средней мощности передатчика 1,5 кВт и коэффициенте шума приемника 2-3, станция обнаружения целей обеспечивала обнаружение самолетов типа F-15, летящих на высотах от 30 до 6000 м, на дальностях 25-27 км с вероятностью не менее 0,8 (беспилотных средств воздушного нападения - на дальностях 9-15 км с вероятностью не менее 0,7). Находившиеся на земле вертолеты с вращавшимися винтами обнаруживались на дальности 6-7 км с вероятностью 0,4-0,7, зависавшие в воздухе - в 13-20 км с вероятностью 0,6-0,8, а осуществлявшие под скок с земли на высоту 20 м - 12 км с вероятностью не менее 0,6.
Коэффициент подавления отраженных от местных предметов сигналов в цифровом канале приемки системы станции обнаружения целей превышал 44 дБ, в аналоговые каналах - 40 дБ.
Защита от противорадиолокационных ракет обеспечивалась их обнаружением и поражением своим ЗУР.
ПодробнееСтанция наведения ЗРК "Тор"
 Станция наведения представляла собой когерентно-импульсную РЛС сантиметрового диапазона вод с малоэлементной фазированной aнтенной решеткой (ФАР), формировавшей луч шириной 1° по азимуту и по углу места и обеспечивавшей электронное сканирование луча в соответствующих плоскостях. Станция обеспечивала поиск цели в секторе 3° по азимуту и 7° по углу места, автосопровождение одной цели по трем координатам моноимпульсным методом, пуск одной или двух ЗУР (с интервалом 4с) и их наведение.
Станция наведения представляла собой когерентно-импульсную РЛС сантиметрового диапазона вод с малоэлементной фазированной aнтенной решеткой (ФАР), формировавшей луч шириной 1° по азимуту и по углу места и обеспечивавшей электронное сканирование луча в соответствующих плоскостях. Станция обеспечивала поиск цели в секторе 3° по азимуту и 7° по углу места, автосопровождение одной цели по трем координатам моноимпульсным методом, пуск одной или двух ЗУР (с интервалом 4с) и их наведение.
Передача на борт ЗУР команд осуществлялась единым передатчиком станции через ФАР. Эта же антенна обеспечивала за счет электронного сканирования луча одновременное измерение координат цели и двух наводимых на нее ЗУР. Частота обращения луча к каждом объекту составляла 40 Гц.
Разрешающая способность станции наведения была не хуже 1 м азимуту и по углу места, 100 м по дальности. Среднеквадратические ошибки автосопровождения истребителя составляли не более 0,3 д. у. по азимуту и по углу места, 7 м по дальности и 30 м/с по скорости. Среднеквадратические ошибки сопровождения ЗУР по азимуту и по углу места были того же порядка, по дальности - не более 2,5 м. При средней мощности передатчика 0,6 кВт и чувствительное приемника 4х10Е-13 Вт станция наведения обеспечивала дальность перехода на автосопровождение истребителя, равную 23 км с вероятностью 0,5 и 20 км с вероятностью 0,8.
ПодробнееМногофункциональная РЛС С-300Ф
Многофункциональный радиолокатор, входящий в систему управления (шифр "Форт"), обеспечивает высокую точность сопровождения 6 целей и наведение на них 12 ракет в условиях воздействия активных и пассивных помех. Фазированная антенная решетка установлена на поворотном посту, что позволяет производить обстрел целей практически в любом направлении. Жесткость конструкции антенного поста и электронная стабилизация луча антенны обеспечивают работу комплекса в условиях качки корабля без потери точности наведения ракеты. Головной разработчик системы С-300Ф - ВНИИ РЭ МСП (позднее НПО "Альтаир"), главный конструктор - В.А. Букатов. Аванпроект комплекса С-300Ф был выполнен в 1966 году.
Сектор обзора РПН по азимуту для С-300Ф 60 град, для РИФ -90 град
С-300Ф принят на вооружение 1985 г, РИФ - в 1993
ПодробнееРадиолокационный пост ЗРПК "Панцирь-С1"
Одновременный обстрел двух целей с разных направлений за счет двух независимых постов -радиолокационного и оптического.
Высокая устойчивость к любого типа помехам благодаря объединению радиолокационных и оптико-электронных средств в единую систему, работающую в дм-, см-, мм- и ИК диапазонах длин волн.
Малое время реакции в пределах 4 - 6 с за счет автоматического сопровождения до 20 целей станцией обнаружения целей и выдачи целеуказания с точностью (по азимуту - 0,4о, по углу места - 0,7о, по дальности - 50 м), обеспечивающей быстрый допоиск и захват целей ССЦР и ТОС на сопровождение. Вычисление параметров цели и ее движения, выбор вооружения и назначение вида огня. Реализация полного цикла боевой работы - от поиска целей до их поражения в автоматическом режиме.
ПодробнееРадиолокатор подсвета цели системы С-200 РПЦ 5Н62В
 Радиолокатор подсветки цели представляет собой высокопотенциальную радиолокационную станцию непрерывного излучения. Она осуществляет сопровождение цели и вырабатывает информацию для пуска ракеты. Кроме этого, подсвечивает цели в процессе самонаведения ракеты.
Радиолокатор подсветки цели представляет собой высокопотенциальную радиолокационную станцию непрерывного излучения. Она осуществляет сопровождение цели и вырабатывает информацию для пуска ракеты. Кроме этого, подсвечивает цели в процессе самонаведения ракеты.
ПодробнееАнтенный пост ЗРК "Шквал"
Система управления зенитного ракетного комплекса "Шквал" имеет в своем составе два радиолокационных канала сопровождения цели, работающих для повышения помехозащищенности в различных диапазонах волн и использующих моноимпульсный метод пеленгации, и два радиолокационных канала командного телеуправления двумя ракетами, работающих также на различных частотах. В системе управления комплекса разработана оригинальная конструкция антенного поста. Две нижние решетчатые параболические антенны сопровождения целей смонтированы на передней поверхности больших контейнеров, в которых находится радиоэлектронная аппаратура целевых и ракетных каналов. Две верхние антенны сопровождения ракет установлены сверху контейнеров, между ними размещена рупорная антенна передачи
команд. В последних модификациях рупорная антенна заменена на параболическую и размещается между целевыми антеннами.
В системе управления комплекса разработана оригинальная конструкция антенного поста. Две нижние решетчатые параболические антенны сопровождения целей смонтированы на передней поверхности больших контейнеров, в которых находится радиоэлектронная аппаратура целевых и ракетных каналов. Две верхние антенны сопровождения ракет установлены сверху контейнеров, между ними размещена рупорная антенна передачи
команд. В последних модификациях рупорная антенна заменена на параболическую и размещается между целевыми антеннами.
ПодробнееМногоканальная станция наведения ракет (СНР) 9С32 С-300В
 Многоканальная станция наведения ракет 9С32 предназначалась для:
Многоканальная станция наведения ракет 9С32 предназначалась для:
- поиска, обнаружения, захвата и автосопровождения аэродинамических целей и БР по данным целеуказания с КП системы и автономно (БР - только по данным ЦУ с КП);
- выработки и передачи на пусковые установки координат и производных координат целей для наведения станций подсвета целей, находящихся на этих установках, а также ЗУР, запускаемых с ПУ и пускозаряжающих установок, на обстреливаемые цели;
- управления огневыми средствами (ПУ и пускозаряжающими установками) как централизованно (от КП системы), так и автономно.
Многоканальная станция наведения ракет была способна одновременно производить секторный поиск целей (по данным ЦУ или автономно) и сопровождать до 12 целей, одновременно управлять работой всех ПУ и пускозаряжающих установок ЗРК, передавая на них информацию, необходимую для пуска и наведения 12 ЗУР по 6 целям. Станция одновременно регулярно осуществляла просмотр приземной кромки, в которой могли появиться низколетящие цели. Станция представляла собой трехкоординатную многоканальную по целям и ЗУР когерентно-импульсную РЛС сантиметрового диапазона с высоким энергетическим потенциалом, электронным сканированием луча в двух плоскостях, обеспечиваемым за счет использования в станции ФАР и системы управления лучом на базе специальной ЭВМ.
В станции использовались моноимпульсный метод пеленгации и дальнометрии целей и различные типы зондирующих сигналов, обеспечивавшие определение координат целей и их производных с высокими точностью и разрешающей способностью. В станции использовалась цифровая обработка сигналов во всех режимах работы.
В многоканальной станции наведения ракет были предусмотрены два режима боевой работы - по данным ЦУ от КП и автономная работа. В первом режиме станция производила поиск целей в секторе 5 град. по азимуту и 6 град. по углу места. Во втором режиме она производила обзор сектора +/-30 град. по азимуту (относительно биссектрисы указанного сектора ответственности) и от 0 град. до 18 по углу места. Азимут (биссектриса) сектора ответственности устанавливалась путем вращения ФАР в пределах +/-340 град.. В станции использовались два типа зондирующих сигналов.
Квазинепрерывный сигнал (импульсные пачки с большой дискретностью) -немодулированный и с линейной частотной модуляцией в пачке, применялся при поиске целей по данным ЦУ, а также для обзора сектора автономного поиска и автосопровождения целей. Импульсный сигнал с линейной частотной модуляцией применялся только при поиске в автономном режиме.
Обработка принятых сигналов производилась квазиоптимальными фильтрами. Формирование и обработка сигнала с внутриимпульсной линейной частотной модуляцией осуществлялась на дисперсионных линиях задержки с высоким коэффициентом сжатия. Обработка квазинепрерывного сигнала производилась коррелляционно-фильтровым методом с интегрированием на промежуточной частоте принятых сигналов с помощью узкополосных фильтров.
Управление системами многоканальной станции наведения ракет в процессе поиска, обнаружения и автосопровождения целей осуществлялось специальной ЭВМ. При автосопровождении сигналы ошибок поступали в следящую координатную систему, которая выдавала в ЭВМ оценки во времени координат и их производных. ЭВМ по этим данным замыкала контур сопровождения, выдавая управляющие коды (сигналы) на синхронизатор, систему управления лучом и другие системы станции. Неоднозначность определения дальности и скорости при поиске квазинепрерывным сигналом устранялась в режиме автосопровождения с помощью производных дальности.
Многоканальная станция наведения ракет при работе в режиме ЦУ обеспечивала обнаружение истребителей на высотах более 5 км на дальностях 150 км, БР типа "Скад" - 90 км, "Ланс"- 60 км, головной части "Першинг" - 140 км, авиационных БР типа SRAM - 80 км. От момента обнаружения до момента перехода на автосопровождение цели с однозначным определением параметров ее движения проходило от 5 секунд ("Першинг" и SRAM) до 11 секунд (цель - истребитель). При работе в автономном режиме многоканальная станция наведения ракет обеспечивала обнаружение самолетов-истребителей на дальностях до 140 км. Среднеквадратические ошибки определения дальности, скорости и угловых координат целей при их ав тосопровождении составляли для истребителя 5-25 м по дальности, 0,3-1,5 м/с - по скорости, 0,2-2 д.у. по азимуту и углу места. Для головной части ракеты "Першинг"- 4-90 м -по дальности, 1,5-35 м/с - по ско-рости, 0,5-1 д.у. по азимуту и углу места. Разрешающая способность составляла 100 м по дальности, 1 град. по азимуту и по углу места, 5 м/с по скорости.
В состав многоканальной станции наведения ракет входили: - антенная система на основе пассивной ФАР с фазовым управлением лучом шириной около 1 град., работавшая "на просвет" при облучении ее рупорным излучателем передатчика и приеме отраженных сигналов тем же коммутируемым рупором;
- передающая система на основе цепочки клистронов, развивавшая среднюю мощность 10-13 кВт (им-пульсную - 150 кВт);
- приемная система с усилителями на высокой частоте, обеспечивавшими очень высокую чувствительность - до 10Е-17 Вт;
- система управления лучом;
- две специальных ЭВМ;
- устройство первичной обработки сигналов;
- система индикации;
- система управления основной антенной и антеннами квадратурных автокомпенсаторов помех;
- следящая координатная система;
- система управления и сигнализации;
- система телекодовой связи с КП системы и пусковыми установками;
- система навигации, топопривязки и ориентирования;
- система автономного электроснабжения на базе газотурбинного генератора:
система жизнеобеспечения.
Вся указанная аппаратура была смонтирована на гусеничном самоходе "объект 833". Масса станции - 44 т. Расчет - 6 чел.
ПодробнееСНР 1С32 ЗРК "Круг"
Станция наведения ракет 1С32 комплекса "Круг" разрабатывалась в НИИ-20 (НИЭМИ) главным конструктором И.М.Дризе.Производство - Марийский МЗ
Станция наведения ракет (СНР) 1С32, которая представляла собой когерентно-импульсную РЛС сантиметрового диапазона, использовалась для радиокомандного управления полетом ЗУР
Антенный пост станции представлял собой довольно сложную поворотную конструкцию, наиболее крупным элементом которой была антенна целевого канала. Слева от нее находилась антенна узкого луча канала ракеты, над которой размещались антенна широкого луча ракетного канала и, ближе к периферии, антенна передатчика команд на ракету. В дальнейшем в верхней части антенного поста разместили камеру телевизионно-оптического визира.
Станция автоматически отрабатывала информацию по целеуказанию, поступающую по телекоду от станции обнаружения целей (СОЦ) 1С12 и производила быстрый поиск цели. Поиск велся только по углу места, так как разрешающая способность станции обнаружения целей в вертикальной плоскости была значительно меньше, чем в горизонтальной. После обнаружения цели осуществлялся захват ее на автосопровождение по угловым координатам и дальности. Далее счетно-решающий прибор на станции наведения ракет определял границы зон пуска и поражения, углы установки антенн захвата и сопровождения ЗУР (с широким и узким сканирующими лучами), а также данные, вводимые в автодальномер цели и ракеты. По передаваемым по телекоду командам от станции наведения ракет производился разворот ПУ в направление пуска. После входа цели в зону пуска и включения передатчика команд нажатием кнопки на станции наведения ракет производился пуск ракеты. Затем ЗУР захватывалась на сопровождение по сигналам ответчика ракеты угломерной (с широким лучом) и дальномерной системами ракетного канала станции наведения ракет и вводилась сперва в узкий луч антенны ракетного канала, а затем и в луч антенны целевого канала. В результате электрические оси обеих антенн ставились параллельно. На борт ракеты передавались текущие команды управления полетом, формируемые счетно-решающим прибором станции наведения ракет при отклонении ЗУР от направления на цель, а также разовая команда на снятие с предохранения радиовзрывателя.
Наведение ЗУР осуществлялось по методу "половинного спрямления" или по методу "трех точек". Радиовзрыватель срабатывал при пролете ракеты на удалении менее 50 м от цели, в противном случае ракета самоликвидировалась. В станции 1С32 был реализован метод скрытого моноконического сканирования по угловым координатам и электронный автодальномер цели. Помехоустойчивость обеспечивалась литерностью каналов, высоким энергетическим потенциалом передатчика, а также кодированием сигналов управления.
В соответствии с расчетными характеристиками импульсная мощность станции наведения ракет составляла 750 кВт, чувствительность приемника - 1Е-13 Вт, ширина луча - 1 град. Захват цели на автосопровождение в беспомеховой обстановке мог осуществляться на дальности до 105 км. При заданном уровне помех (1,5-2 пачки диполей на 100 м пути цели) дальность автосопровождения уменьшалась до 70 км.
Ошибки сопровождения цели по угловым координатам не превышали 0,3 ду. (деление угломера, т.е. 0,06 град.), по дальности - 15 м. В дальнейшем для защиты от ракет типа "Шрайк" ввели прерывистые режимы работы.
Станция наведения ракет размещалась на самоходе "объект 124", в основном аналогичном шасси пусковой установки.
ПодробнееСтанция 1С12 (дальномер) ЗРК "Круг"
В состав зенитного ракетного дивизиона, вооруженного ЗРК "Круг", также входило средство разведки целей, роль которого выполняла станция обнаружения целей 1С12 - дальномерная РЛС сантиметрового диапазона. В сочетании с одним - двумя радиовысотомерами ПРВ-9А эта же станция под наименованием П-40 ("Броня") использовалась и в радиолокационных ротах войсковой ПВО. РЛС была разработана НИИ- 208 (впоследствии НИИ ИП Минрадиопрома) под руководством главного конструктора В.В.Райзберга.
Станция обнаружения целей 1С12 обеспечивала обнаружение истребителя на дальностях до 180 км (при высоте полета 12 000 м) и 70 км для цели, летящей на высоте 500 м. Импульсная мощность излучения станции составляла 1,7-1,8 МВт, чувствительность приемника - 4,3-7,7Е-14 Вт. При круговом обзоре последовательно формировались 4 луча в угломестной плоскости: два нижних шириной 2 град. и 4 град, а также два верхних шириной 10 град. и 14 град. Переключение направления луча осуществлялось электромеханическим способом.
ПодробнееСтанция обнаружения и целеуказания (CОЦ) 9С18М17 "Купол" ЗРК "Бук-М1Э"
 Мобильная трехкоординатная когерентно-импульсная СОЦ 9С18М1Э сантиметрового диапазона с электронным сканированием луча по углу места (устанавливается 30° или 40°) и механическим вращением антенны по азимуту предназначена для обнаружения и опознавания воздушных целей на дальностях до 110-120 км (45 км при высоте полета 30 м) и передачи информации о них по телекодовой линии связи на командный пункт ЗРК "Бук-М1Э" (9С470) и на пункты управления войск ПВО.
Мобильная трехкоординатная когерентно-импульсная СОЦ 9С18М1Э сантиметрового диапазона с электронным сканированием луча по углу места (устанавливается 30° или 40°) и механическим вращением антенны по азимуту предназначена для обнаружения и опознавания воздушных целей на дальностях до 110-120 км (45 км при высоте полета 30 м) и передачи информации о них по телекодовой линии связи на командный пункт ЗРК "Бук-М1Э" (9С470) и на пункты управления войск ПВО.
Антенная система СОЦ представляет собой плоскую волноводную решетку, формирующую диаграмму направленности в виде узкого ("карандашного") луча и позволяющую производить электронное сканирование его в угломестной плоскости. Низкий уровень боковых лепестков и фон такой антенны обеспечивают малый уровень отражений от подстилающей поверхности и ослабляют воздействие на СОЦ активных помех внешнего прикрытия. С помощью гидравлической системы осуществляется компактное сложение и быстрое развертывание антенны.
Мгновенная перестройка рабочей частоты в широкой полосе позволяет СОЦ отстраиваться от активных прицельных помех.
Программное управление гидравлическим приводом вращения антенны по азимуту в сочетании с электронным сканированием луча по углу места позволяет оптимизировать энергетические затраты в зоне обзора в зависимости от целевой и помеховой обстановки, что в свою очередь позволяет обнаруживать крылатые и тактические баллистические ракеты и аэродинамические цели в секторах с большим уровнем помех.
Управление работой СОЦ и обработка радиолокационной информации осуществляется цифровым устройством управления, ядром которого является высокопроизводительный бортовой компьютер, что придает ей высокую степень автоматизации управления режимами работы и программами обзора, а также высокую пропускную способность.
Примененная в СОЦ аппаратура черезпериодной компенсации позволяет свести к минимуму отражения от местных предметов, дипольных помех и облаков. Этому способствует также используемая в СОЦ временная автоматическая регулировка усиления приемника. Аппаратура межобзорного бланкирования отражений от местных предметов существенно снижает уровень ложных отметок на выходе СОЦ.
Основные технические характеристики - Зона обнаружения по азимуту: по аэродинамическим целям 360 град, по баллистическим целям 120 град; по углу места: по аэродинамическим целям 40 град, по баллистическим целям 55 град
- Дальность обнаружения аэродинамических целей типа МиГ-21 100 км
- СКО: по дальности 150 м, по азимуту 38 мин, по углу места 30 мин
- разрешающая способность по дальности не хуже 300 м, по азимуту и по углу места - 4°.
- Темп обзора пространства в зависимости от установленного сектора по углу места и наличия помех составлял от 4,5 до 18 с при круговом обзоре и от 2,5 до 4,5 с при обзоре в секторе 30°.
- Радиолокационная информация передавалась по телекодовой линии на КП 9С470 в объеме 75 отметок за период обзора (4,5 с).
- Количество целей, координаты которых выдаются потребителю за каждый обзор 100
Для защиты от прицельных помех использовалась перестройка несущей частоты от импульса к импульсу, от ответных - то же и бланкирование интервалов дальности по каналу автосъема, от несинхронных импульсных - смена наклона линейно-частотной модуляции и бланкирование участков дальности. При шумовых заградительных помехах самоприкрытия и внешнего прикрытия заданных уровней станция обнаружения и целеуказания обеспечивала обнаружение самолета-истребителя на дальности не менее 50 км. Станция обеспечивала проводку целей с вероятностью не ниже 0,5 на фоне местных предметов и в пассивных помехах при помощи схемы селекции движущихся целей с автокомпенсацией скорости ветра. Станция была защищена от протоворадиолокационных ракет путем реализации программной перестройки несущей частоты за 1,3 с, перехода на круговую поляризацию зондирующих сигналов или в режим прерывистого излучения (мерцания).
Время готовности с марша и время свертывания, мин. 5. Время перевода станции из дежурного режима в рабочий - не более 20 с.
В состав станции входили антенный пост, состоящий из отражателя усеченного параболического профиля, облучателя в виде полноводной линейки, обеспечивающей электронное сканирование луча в угломестной плоскости, поворотного устройства, устройства сложения антенны в походное положение; передающее устройство (со средней мощностью до 3,5 кВт); приемное устройство (с коэффициентом шума не более 8) и другие системы.
Аппаратура СОЦ размещена на самоходном гусеничном шасси высокой проходимости (ГМ-567). Масса СОЦ составляет ~35 т.
СОЦ оборудована встроенной системой электропитания, аппаратурой ориентирования, топопривязки и навигации, радиосвязью и внутренней телефонной связью, средствами химической и радиационной разведки.
Энергообеспечение осуществляется от газотурбинного агрегата мощностью 75 кВт, или от генератора отбора мощности маршевого двигателя шасси, или от промышленной сети 220 В 50 Гц через преобразователи.
Обслуживается боевым расчетом из 3 человек. Система автоматизированного контроля технического состояния аппаратуры позволяет выявлять отказы с точностью до сменного элемента, заменяемого из ЗИП.
Подробнее
ПодробнееРЛС кругового обзора 1С11 ЗРК "Куб"
 В состав самоходной установки разведки и наведения 1С91 входили две радиолокационные станции - РЛС обнаружения воздушных целей и целеуказания 1C11 и РЛС сопровождения цели и подсвета 1С31, а также средства, обеспечивающие опознание целей, навигацию, топопривязку, взаимное ориентирование, радиотелекодовую связь с самоходными пусковыми установками, телевизионно-оптический визир, автономный источник электропитания (использовался газотурбинный электрогенератор), системы подъема антенны и горизонтирования.
В состав самоходной установки разведки и наведения 1С91 входили две радиолокационные станции - РЛС обнаружения воздушных целей и целеуказания 1C11 и РЛС сопровождения цели и подсвета 1С31, а также средства, обеспечивающие опознание целей, навигацию, топопривязку, взаимное ориентирование, радиотелекодовую связь с самоходными пусковыми установками, телевизионно-оптический визир, автономный источник электропитания (использовался газотурбинный электрогенератор), системы подъема антенны и горизонтирования.
Антенны РЛС располагались в два яруса - сверху антенна станции 1С31, ниже - 1C11 - и могли вращаться по азимуту независимо друг от друга. Для уменьшения высоты самохода на марше цилиндрическое основание антенных устройств убиралось внутрь корпуса гусеничной машины, а антенное устройство РЛС 1С31 разворачивалось вниз, располагаясь позади антенны станции 1С11. Исходя из стремления обеспечить требуемую дальность при ограниченном энергоснабжении с учетом габаритно-массовых ограничений по антеннам постам для станции 1С11 и для режима сопровождения цели в станции 1С31 приняли схему когерентно-импульсной РЛС. Однако, при подсвете цели для устойчивой работы ГСН при маловысотном полете в условиях мощных отражений от подстилающей поверхности был реализован режим непрерывного излучения.
Когерентно-импульсная РЛС кругового обзора (скорость обзора - 15 об./мин) сантиметрового диапазона с двумя независимыми работающими на разнесенных несущих частотах волноводными приемо-передающими каналами, излучатели которых установлены в фокальной плоскости единого антенного зеркала. Обнаружение, опознание цели и целеуказание станции сопровождения и подсвета обеспечивалось при нахождении цели на дальностях от 3 до 70 км и на высотах от 30 до 7000 м при импульсной мощности излучения 600 кВт в каждом канале, чувствительности приемников порядка 10Е-13 Вт, ширине лучей по азимуту около 1° и суммарном секторе обзора по углу места около 20°.
Для обеспечения помехозащищенности в станции 1С11 были предусмотрены: системы селекции движущихся целей (СДЦ) и подавления несинхронных импульсных помех; ручная регулировка усиления приемных каналов; модуляция частоты повторения импульсов; перестройка частоты передатчиков.
ПодробнееРЛС сопровождения и подсвета 1С31 ЗРК "Куб"
РЛС состояла из двух каналов с излучателями, установленными в фокальной плоскости параболического отражателя единой антенны - сопровождения цели и подсвета цели. По каналу сопровождения цели станция имела импульсную мощность 270 кВт, чувствительность приемника порядка 10Е-13 Вт, ширину луча около 1°.
Среднеквадратичная ошибка (СКО) сопровождения цели по угловым координатам составляла около 0,5 д.у., по дальности - около 10 м.
Станция могла захватывать на автосопровождение самолет типа "Фантом-2" с вероятностью 0,9 на дальности до 50 км. Защита от пассивных помех и отражений от земли осуществлялась системой СДЦ с программным изменением частоты повторения импульсов, от активных помех -использованием метода моноим-пульсной пеленгации целей, системы индикации помех и перестройкой рабочей частоты станции. В том случае, если станция 1С31 все-таки подавлялась помехами, можно было сопровождать цель по угловым координатам с помощью телевизионного оптического визира, а информацию о дальности получать от РЛС 1C11. В станции предусмотрели специальные меры для устойчивого сопровождения низколетящих целей. Передатчик подсвета цели (и облучения ГСН ракеты опорным сигналом) генерировал непрерывные колебания и обеспечивал надежную работу ГСН ракеты. Оборудование самоходной установки разведки и наведения размещалась на шасси ГМ-568. Масса самоходной установки разведки и наведения с боевым расчетом из 4 человек составляла 20,3 т.
В соответствии с рекомендациями госкомиссии ЗРК "Куб" с 1967 года началась первая модернизация комплекса. В результате доработок были предусмотрены прерывистые режимы работы РЛС самоходной установки разведки и наведения для защиты от противорадиолокационных ракет типа "Шрайк" и повышена защищенность ГСН от уводящих помех
ПодробнееАРЛСК (1РЛ116, 5Н85, 36Ж6)
 Для наблюдения за воздушным пространством в труднодоступных районах (север) разработана серия автоматических радиолокационных и связных комплексов (АРЛСК). Конструкция РЛС обладает очень высокой надежностью.
Для наблюдения за воздушным пространством в труднодоступных районах (север) разработана серия автоматических радиолокационных и связных комплексов (АРЛСК). Конструкция РЛС обладает очень высокой надежностью.
Различные варианты АРЛСК имеют обозначения 1РЛ116, 5Н85, 36Ж6 и отличаются друг от друга степенью модернизации и сроком выпуска.
Радиолокационные посты N2 и N3 располагаются на расстоянии 200 км от поста N1 и на 400 км между собой и автоматически передают информацию о воздушной обстановке вокруг себя и о техническом состоянии РЛС на пост N1, где находятся операторы. В аппаратуре РЛС зарезервированы основные системы, и в случае неисправности, автоматически происходит переключение на запасной комплект отказавшего блока. Аппаратура РЛС и антенна размещаются под сферическим радиопрозрачным укрытием
ПодробнееРЛС подсвета и наведения (РЛО) 30Н6Е1
 Радиолокатор подсвета и наведения ЗОН6Е2 в составе ЗРК С-300 ПМУ2 обеспечивает поиск, обнаружение, автоматическое сопровождение целей, осуществляет все операции, связанные с подготовкой и ведением стрельбы зенитными ракетами, а также оценивает результаты стрельбы. Многофункциональность локатора обеспечивается применением фазированных антенных решеток Х-диапазона и высокой автоматизацией всех процессов его функционирования на основе современных быстродействующих цифровых методов управления.
Радиолокатор подсвета и наведения ЗОН6Е2 в составе ЗРК С-300 ПМУ2 обеспечивает поиск, обнаружение, автоматическое сопровождение целей, осуществляет все операции, связанные с подготовкой и ведением стрельбы зенитными ракетами, а также оценивает результаты стрельбы. Многофункциональность локатора обеспечивается применением фазированных антенных решеток Х-диапазона и высокой автоматизацией всех процессов его функционирования на основе современных быстродействующих цифровых методов управления.
ПодробнееРЛ обеспечение ЗРПК "Тунгуска"

Станция обнаружения целей
Станция обнаружения целей боевой машины комплекса "Тунгуска" представляет собой когерентно-импульсную РЛС кругового обзора дециметрового диапазона волн. Высокая стабильность частоты передатчика, выполненного в виде задающего генератора и усилительной цепочки, применение фильтровой схемы селекции движущихся целей обеспечивает высокий коэффициент подавления отражений от местных предметов (30..40 дБ), что позволяет производить обнаружение целей на фоне интенсивных отражений от подстилающей поверхности и в пассивных помехах.
Подбором значений несущей частоты и частоты повторения импульсов было достигнуто однозначное определение дальности и радиальной скорости, что позволило реализовать сопровождение цели по дальности и по азимуту, автоматическое целеуказание станции сопровождения цели и выдачу текущей дальности в цифровую вычислительную систему при постановке противником интенсивных помех в диапазоне станции сопровождения. Для обеспечения работы в движении антенна была стабилизирована электромеханическим способом с использованием сигналов от датчиков системы измерения качек и курса самохода.
При импульсной мощности передатчика 7-10 кВт, чувствительности приемника порядка 2х10Е-14 Вт, ширине диаграммы направленности антенны по азимуту 5° и по углу места 15° станция с вероятностью 0,9 обеспечивала обнаружение истребителя, летящего на высотах 25-3500 м, на дальности 16-19 км. Разрешающая способность станции составляла 500 м по дальности, 5-6° по азимуту и в пределах 15° по углу места.
Среднеквадратические ошибки определения координат цели были в пределах 20 м по дальности, 1° по азимуту и 5° по углу места.
Станция сопровождения цели
Станция сопровождения цели представляет собой когерентно-импульсную РЛС сантиметрового диапазона с двухканальной системой сопровождения по угловым координатам и с фильтровыми схемами селекции движущихся целей в каналах автодальномера и углового автосопровождения. Коэффициент подавления пассивных помех и отражений от местных предметов составлял 20-25 дБ. Станция осуществляла переход на автосопровождение в режимах целеуказания и секторного поиска цели. Сектор поиска составлял 120° по азимуту и 0-15° по углу места.
При импульсной мощности передатчика 150 кВт, чувствительности приемника 3х10Е-13 Вт, ширине диаграммы направленности антенны 2 град. (по азимуту и по углу места) станция с вероятностью 0,9 обеспечивала переход на автосопровождение по трем координатам летящего на высотах 25 - 1000 м истребителя с дальностей 10…13 км (при целеуказании от станции обнаружения целей) и с 7,5…8,00 км (при самостоятельном секторном поиске цели). Разрешающая способность станции была не хуже 75 м по дальности и 2 град. по угловым координатам. Среднеквадратические ошибки сопровождения цели по дальности составляли 2 м, а по угловым координатам - 2 д.у.
Обе станции успешно обнаруживали и сопровождали низколетящие и зависающие вертолеты. Дальность обнаружения вертолета, летящего со скоростью 50 м/с на высоте 15 м, с вероятностью 0,5 составляла 16-17 км, дальность перехода на автосопровождение - 11-16 км. Зависающий вертолет выявлялся станцией обнаружения по доплеровскому смещению частоты от вращающегося винта и брался на автосопровождение по трем координатам станцией сопровождения целей.
Станции имели схемные средства защиты от активных помех, а также способность сопровождения цели в помехах за счет комбинаций в использовании радиолокационных и оптических средств боевой машины. За счет этих комбинаций, разноса рабочих частот станций, регламентированной по времени или одновременной работы на близких частотах нескольких (удаленных друг от друга на расстояние более 200 м) боевых машин в составе батареи могла обеспечиваться надежная защита от ракет типа "Шрайк" или "Стандарт АРМ".
ПодробнееРЛС "Небо СВ" (1Л13)
 Метровая РЛС дежурного режима 1Л13 представляла собой подвижную когерентно-импульсную радиолокационную станцию, размещенную на четырех транспортных единицах (три автомобиля типа "Урал" и прицеп типа 2-ПН-4М).
Метровая РЛС дежурного режима 1Л13 представляла собой подвижную когерентно-импульсную радиолокационную станцию, размещенную на четырех транспортных единицах (три автомобиля типа "Урал" и прицеп типа 2-ПН-4М).
При импульсной мощности 120 кВт, чувствительности приемника -103 дБ/Вт и ширине ДНА по азимуту 6° РЛС 1Л13 обеспечивала в режиме "Основной луч" (при угле наклона антенны 9°) обнаружение самолета-истребителя в беспомеховой обстановке с вероятностью 0,8 в зоне с границами: по дальности: на высотае 100 м - 22,5-27,5 км; 500 м - 45-57 км;10000 м - 236-273 м; 27000 м-335-425 км;
Зона обзора по азимуту . 360°;по углу места.25-29°; по высоте (без провалов) . от 23 до 42,5 км.
В режиме "Нижний луч" (при угле наклона антенны 0°) дальность обнаружения цели под малыми углами места возростала до 29 км на высоте 100 м и до 278 км на высоте 10000 м.
В режиме "Верхний луч" (при наклоне антенны на 13°) обеспечивалось увеличение верхней границы зоны обнаружения по углу места до 30'.
При воздействии на станцию активных шумовых, пассивных и комбинированных помех заданных уровней дальность действия РЛС по цели на высоте 10000 м не снижалась более чем до 200 км. В станции обеспечивалась поимпульсная перестройка рабочей частоты при воздействии прицельных помех.
Коэффициент подпомеховой видимости цели на фоне отражений от местных предметов составлял не менее 50 дБ.
Среднеквадратические ошибки измерения координат цели не превышали 600 м по дальности и 1° по азимуту. Ошибки измерения угла места (высоты) цели определялись точностью сопряженного с РЛС радиовысотомера.
Разрешающая способность станции на расстоянии более 50 км составляла по дальности не более 1000 м и по азимуту 6°. По углу места (высоте) цели разрешались в соответствии с возможностями сопряженных со станцией радиовысотомеров.
Период кругового обзора станции составлял 10 с или 20 с. В режиме автосъема информация могла быть получена не менее чем о 50 целях.
Время развертывания станции составляло 40 мин, а время включения при работающей электростанции - 3 мин.
Боевой расчет станции состоял из 6 чел.
Подробнее
ПодробнееРЛС "Небо" (55Ж6)
3-х координатная РЛС обнаружения и сопровождения воздушных объектов РЛС 55Ж6 - помехозащищенная станция с высокой эффективностью обнаружения целей, работает в метровом диапазоне.
РЛС имеет дальность обнаружения 600 км при высоте полета цели 75 тыс. метров, неуязвима для противорадиолокационных ракет.
Размещается в 7 фургонах - полуприцепах.
Подробнее
ПодробнееРЛС "Оборона 14" (5Н84А)
2-х координатная метровая РЛС дежурного режима
ПодробнееТрехкоординатная РЛС обнаружения НЛЦ СТ-68УМ (5Н59)
 Станция предназначена для обнаружения, опознавания и сопровождения воздушных целей, в том числе стратегических крылатых ракет типа ALCM, при воздействии организованных активных и пассивных помех, а также отражений от земной поверхности и метеообразований. Применяется в войсках ПВО, подразделениях и частях связи и радиотехнического обеспечения ВВС.
Станция предназначена для обнаружения, опознавания и сопровождения воздушных целей, в том числе стратегических крылатых ракет типа ALCM, при воздействии организованных активных и пассивных помех, а также отражений от земной поверхности и метеообразований. Применяется в войсках ПВО, подразделениях и частях связи и радиотехнического обеспечения ВВС.
Станция боевого режима СТ-68УМ работает в сантиметровом диапазоне радиоволн. Обзор в угломестной плоскости производится с помощью парциальной диаграммы направленности, в азимутальной плоскости - путем механического вращения антенной системы РЛС, - вкруговую со скоростью 6 или 12 об./мин.
В состав РЛС входят:
- радиотехническая аппаратура и антенная система РЛС, размещаемые на шасси полуприцепа МАЗ-938Б;
- система электроснабжения 99Х6 в кузове-фургоне КП-10 на шасси прицепа МАЗ-5224В.
Кроме того. в зависимости от варианта комплектации, станция может оснащаться вышкой 40В6М и кабиной связи 6ИИОЗ на шасси автомобиля КамАЗ-4310.
С помощью вышки можно поднять фазовый центр антенны на высоту 24 м, что позволяет РЛС успешно обнаруживать маловысотные цели, а также работать при расположении позиции в условиях лесистой местности. Кабина связи используется для передачи радиолокационной информации и команд управления от РЛС на расстояние до 35 км.
Станция имеет аппаратуру защиты как от активных, так и пассивных помех.
Основные характеристики
Диапазон волн
сантиметровый
Дальность обнаружения при одновременном воздействии пассивных помех плотностью 0,3-0,5 пачки ДОС-ЩД-51МУ на 100 м пути и активных шумовых помех плотностью мощности 10 Вт/МГц, в вариантах комплектации с вышкой 40В6М (без вышки), км:
самолета типа МиГ-21, на высоте: - 50 м
33 (28)
- 100 м
46(42)
- 500 - 6000 м
не менее 80
стратегической крылатой ракеты типа ALCM, на высоте:
- 60 м
32 (20)
- 100 - 3000 м
40 (30)
Дальность обнаружения при отсутствии организованных помех на фоне отражений от земной поверхности и метеообразований в вариантах комплектации с вышкой 40В6М (без вышки), км:
самолета типа МиГ-21, на высоте:
- 50 м
40 (31)
- 100 м
51 (42)
- 500 м
92 (82)/TD>
- 2000 - 18000 м
147 (175)
стратегической крылатой ракеты типа ALCM, на высоте:
- 30 м
27
- 60 м
40 (27)
- 100 м
48 (33)
- 300 - 3000 м
60
Минимальная радиальная скорость целей, км/ч
60 - 180
Коэффициент подавления отражений от местных предметов, дБ
не менее 48
Среднее время наработки на отказ, ч
100
Время развертывания (свертывания) станции, ч:
- без вышки и кабины связи
1
- с вышкой и кабиной связи
2
Обслуживающий персонал (при боевой работе в три смены), чел.
7
ПодробнееТрехкоординатная РЛС дальнего обнаружения "Резонанс" Пердназначена для обнаружения и измерения дальности, азимута, угла места и радиальной скорости малозаметных целей. Работает в метровом диапазоне волн, использует эффект резонанса планера лететельного аппарата. Станция размещается на 5 транспортных единицах (3 полуприцепа с аппаратурой и 2 с автономным питанием).
- Зона обзора по азмуиту 360 о, по углу места 70 о, по высоте - до 100 км
- Дальность обнаружения истребителя на высоте 10000 м 350 км
- Точность измерения координат по дальности 300 м, по углу места 1,5 о, по азимуту 1,5 о, по скрости 0,5 м/с
- Коэффициент подпомеховой видимости 70 дб
- Темп обновления информации 10 сек
- Обслуживающий персонал 3 чел
Радиолокационный комплекс 57У6 "Телескоп-ВМ"
 Радиолокационный комплекс 57У6 предназначен для обнаружения и проводки на фоне земли и метеообразований воздушных целей, в том числе крылатых ракет типа АЛКМ, летящих в горных условиях на малой высоте, в сложной помеховой обстановке и обеспечения радиолокационной информацией боевых действий зенитно-ракетных войск и истребительной авиации.
Радиолокационный комплекс 57У6 предназначен для обнаружения и проводки на фоне земли и метеообразований воздушных целей, в том числе крылатых ракет типа АЛКМ, летящих в горных условиях на малой высоте, в сложной помеховой обстановке и обеспечения радиолокационной информацией боевых действий зенитно-ракетных войск и истребительной авиации.
Состав РЛК:
- Антенно-поворотное устройство
- Кабина охлаждения и преобразователя (КОП)
- Выносные рабочие места операторов (ВРМО)
- Дизельная электростанция 5Е96
- Кабина коммутации и преобразования SE88РЛК 57У6 представляет собой двухкоординатную РЛС кругового обзора с эффективным цифровым устройством селекции движущихся целей (СДЦ), когерентным передающим устройством. Управление комплексом осуществляется с помощью системы цифровых вычислительных средств, обеспечивающих обработку радиолокационной информации, автоматизацию контроля технического состояния комплекса, поиска неисправностей и документирования.
РЛК развертывается на двух площадках, удаленных друг от друга не более 1 км на высоте до 3000 м. Позиция для размещения не требует специальной инженерной подготовки. Управление РЛК во время боевой работы осуществляется дистанционно из выносного рабочего места оператора (ВРМО). При проведении регламентных работ управление возможно из аппаратной кабины (КА)
При решении задач противовоздушной обороны (ПВО) РЛК может работать совместно с автоматизированными системами управления (АСУ).
Аппаратура документирования обеспечивает фотографирование индикатора с экрана ИКО, регистрацию результатов контроля комплекса и запись переговоров с АСУ. Встроенная автоматизированная система контроля (BACK) обеспечивает контроль за всеми основными параметрами комплекса с документированием результатов на телетайпе.
Основные характеристики
1. Диапазон излучения дециметровый
2. Мощность в импульсе до 100 кВт
3. Дальность обнаружения цели с эффективной отражающей поверхности (ЭОП) 2,5 м2 станцией на высоте 2000 м над уровнем моря: - без помех 200 км - в помехах 100км
4. Коэффициент подавления отражения от земной поверхности не менее 60 дБ
5. Потребляемая мощность (от трехфазной сети 380 Вт частотой 50 Гц) до 90 кВт
6. Условия эксплуатации: - температура окружающей Среды ±50°С - относительная влажность (при температуре +35°С) 98% - антенное устройство выдерживает ветровые нагрузки до 40 м/с.
ПодробнееТрехкоординатная РЛС боевого режима 22Ж6 "Десна"
 Трехкоординатная РЛС боевого режима 22Ж6 "Десна" предназначена для кругового обзора пространства в боевом режиме. Нижняя антенна передающая, верхняя - приемная.
Трехкоординатная РЛС боевого режима 22Ж6 "Десна" предназначена для кругового обзора пространства в боевом режиме. Нижняя антенна передающая, верхняя - приемная.
Модификация "Десна-М" (22Ж6М). В комплект РЛС "Десна-М" входят: антенно-поворотное устройство (6ГГ); аппаратный прицеп (6РР); модуляторный прицеп (6ГМ-М); система электропитания на двух-трех прицепах; прицеп ЗИП: два полуприцепа типа МАЗ-938Б с укладками и антенными системами. Антенно-поворотное устройство должно быть размещено на искусственном холме высотой 6 м, с углами закрытия не более 10 мин. Общие размеры площадки для размещения - 200 х 200 м.
Для создания комфортных условий работы обслуживающего персонала станция может комплектоваться выносным индикаторным постом на пять рабочих мест, размещаемых на расстоянии до 1000 м от РЛС. Станция перевозится своим ходом с использованием тягачей, а также железнодорожным транспортом (на 10 платформах).
Электропитание производится от собственных автономных электростанций или промышленной сети 380 В 50 Гц. РЛС "Десна-М" может эксплуатироваться при температуре окружающей среды ±50° С, относительной влажности воздуха до 98% (при +35° С), скорости ветра до 20 м/с. Высота размещения (над уровнем моря) - до 1000 м.
Тактико-технические данные
Диапазон волн дециметровый
Дальность обнаружения цели типа "истребитель" на высоте 10000 м, 300 км
Верхняя граница обнаружения цепи типа "истребитель", 40 км
Темп обзора 10 с
Точность измерения координат целей на высоте 10000 м:
- по дальности 300 м
- по высоте 500 м
- по азимуту 15'
Коэффициент подавления отражений от местных предметов не менее 30 дБ
Время развертывания (свертывания) не более 10 ч
Потребляемая мощность 260 кВт
Обслуживающий персонал 16 чел
Подробнее
Трехкоординатная секторная РЛС 5Н56 "Шпага"
Трехкоординатная секторная РЛС боевого режима 5Н56 "Шпага" предназначена для вскрытия целей в сложной помеховой ситуации. РЛС могла также работать в круговом режиме.Радиовысотомер ПРВ-9 "Наклон-2"
Разработка была начата в ОКБ-588 МГСНХ в 1958 г. В 1960 г. ПРВ-9 проходил государственные испытания на и был принят на вооружение.Вся аппаратура и агрегат питания высотомера были смонтированы на двух транспортных единицах - прицепах. ПРВ-9 обеспечивал обнаружение самолета-истребителя на дальностях 115-160 км и на высотах 1-12 км соответственно. . Ошибки измерения координат цели составляли: дальности - 700 м, азимута - 1,6°, высоты - 100-130 м. Мощность импульсного излучения составляла 0,8 МВт, чувствительность приемника - 5х10Е14 Вт. Ширина ДНА по азимуту - 2,5', по углу места -1,1°. Время развертывания - 45 мин. В ПРВ-9 была предусмотрена защита от активных и пассивных помех. Высотомер мог сопрягаться со всеми РЛС кругового обзора.
ПодробнееРадиовысотомер ПРВ-11 "Вершина"
 Высотомер обеспечивал обнаружение самолета-истребителя на дальности 230 км - на средних и больших высотах (до 34 км), и 60 км - на малых высотах (0,5 км) в секторе углов места от 0,5 до 30°. При этом ошибки измерения дальности составляли примерно 1000 м, а высоты - 200-500 м при дальностях 200-230 км. Импульсная мощность высотомера составляла 1,2 МВт, чувствительность приемника - 3,5х10'14 Вт, ширина ДНА по азимуту - 2,6°, по углу места - 1,1°. Время развертывания - 3 ч. ПРВ-11 мог сопрягаться практически со всеми дальномерными РЛС обнаружения (кругового обзора). Защита высотомера от активных помех обеспечивалась дистанционной перестройкой на любую из пяти фиксированных рабочих частот. Защита от пассивных помех осуществлялась системой СДЦ когерентно-компенсационного типа (с двойной ЧПК помех на потенциалоскопах). Вся аппаратура ПРВ-11 была смонтирована на трех прицепах.
Высотомер обеспечивал обнаружение самолета-истребителя на дальности 230 км - на средних и больших высотах (до 34 км), и 60 км - на малых высотах (0,5 км) в секторе углов места от 0,5 до 30°. При этом ошибки измерения дальности составляли примерно 1000 м, а высоты - 200-500 м при дальностях 200-230 км. Импульсная мощность высотомера составляла 1,2 МВт, чувствительность приемника - 3,5х10'14 Вт, ширина ДНА по азимуту - 2,6°, по углу места - 1,1°. Время развертывания - 3 ч. ПРВ-11 мог сопрягаться практически со всеми дальномерными РЛС обнаружения (кругового обзора). Защита высотомера от активных помех обеспечивалась дистанционной перестройкой на любую из пяти фиксированных рабочих частот. Защита от пассивных помех осуществлялась системой СДЦ когерентно-компенсационного типа (с двойной ЧПК помех на потенциалоскопах). Вся аппаратура ПРВ-11 была смонтирована на трех прицепах.
Высотомер принят на вооружение в 1961 г.
ПодробнееРадиовысотомер ПРВ-13
Создан на базе ПРВ-11. Помимо повышения основных ТТХ ПРВ-11 в новый высотомер были введены трехкоординатный и программный режимы работы пеленгационного канала, была обеспечена возможность определения дальности, азимута и высоты низколетящих целей (от 100 м и выше) в автономном режиме и по целеуказанию от сопрягаемой РЛС кругового обзора, выдачи пеленгов помехоносителей на указанную РЛС, а также наведения самолетов-истребителей при взаимодействии пунктов управления ПВО и ВВС в общих зонах боевых действий/
ПодробнееРЛС дальнего обнаружения П-14
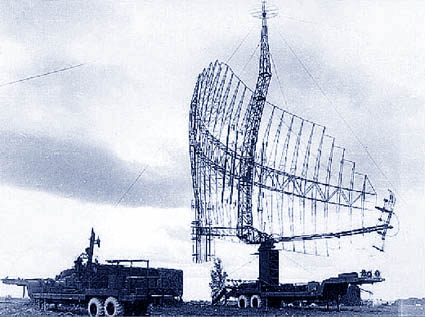 Разработана и серийно выпускалась в ОАО "НИТЕЛ" с 1959 г. в двух вариантах.
· 1РЛ113 и 44Ж6 - стационарные варианты, размещаются в специальном здании.
· РЛС 5Н84 - мобильные, размещаются в шести больших фургонах - полуприцепах. Параболическая антенна имеет размах зеркала 32 метра при высоте 11 метров. Эти станции обеспечивают обнаружение целей на расстоянии до 400 км при высоте полета воздушных целей до 30 тыс. метров.
Разработана и серийно выпускалась в ОАО "НИТЕЛ" с 1959 г. в двух вариантах.
· 1РЛ113 и 44Ж6 - стационарные варианты, размещаются в специальном здании.
· РЛС 5Н84 - мобильные, размещаются в шести больших фургонах - полуприцепах. Параболическая антенна имеет размах зеркала 32 метра при высоте 11 метров. Эти станции обеспечивают обнаружение целей на расстоянии до 400 км при высоте полета воздушных целей до 30 тыс. метров.
Тактико-технические данные
Дальность обнаружения на высоте 30 км 400 км
Размах зеркала 32 м
Высота зеркала 11 м
ПодробнееМетровая РЛС дальнего обнаружения П-8 Значительным научно-техническим шагом вперед в развитии РЛС метрового диапазона стало создание в НИИ радиопромышленности станции дальнего обнаружения П-8.
Станция производила обнаружение самолетов в режиме кругового обзора и в условиях пассивных и активных (импульсных) помех. РЛС обеспечивала обнаружение самолетов на дальностях до 150 км при высоте полета 8000 м, обладала разрешающей способностью по дальности не хуже 2,5 км и по азимуту 24°. Мощность импульсного излучения составляла 70-75 кВт, а чувствительность приемника - не хуже 7 мкВ.Станция имела двухэтажную антенну из 4 элементов типа "волновой канал", работающую на передачу и прием. В станции использовались два индикатора - кругового обзора и высоты. Индикатор высоты в комплексе с гониометром позволял определить угол места цели и с помощью номограмм - высоту ее полета. В состав станции входили блоки защиты от помех и наземный радиолокационный запросчик НРЗ-1, имеющий отдельную антенну и работающий в системе опознавания государственной принадлежности самолетов "Кремний-1". Для защиты от пассивных помех использовалась простейшая система селекции движущихся целей (СДЦ) с когерентным гетеродином в приемном устройстве без схемы череспериодной компенсации (ЧПК) импульсов. Индикация подвижной цели производилась по биениям между напряжениями принятого сигнала и когерентного гетеродина. Передатчик станции имел схему стабилизации частоты. Супергетеродинный приемник обеспечивал двойное преобразование высокой частоты - в промежуточную и низкую. На низкой частоте производилась защита станции от активных импульсных помех с помощью схем селекции принимаемых сигналов по амплитуде и дальности (схемы СА и СД). Индикатор кругового обзора (ИКО) имел электронно-лучевую трубку с двумя флюоресцирующими слоями, светящимися голубым и оранжевым цветом. Голубое (быстроисчезающее) свечение позволяло хорошо индицировать вновь появляющиеся цели, а оранжевое (длительное) - видеть вкруговую всю воздушную обстановку в течение периода обзора при вращении антенны со скоростью 2 об./мин. Аппаратура станции и агрегаты электропитания размещались в двух автомашинах.
В период 1949-1950 гг. РЛС П-8 успешно прошла испытания на Донгузском полигоне (военный инженер-испытатель Г. Т. Опрышко) и была принята на вооружение. Станция нашла широкое применение в войсках ПВО, в ВВС и в береговых частях ПВО ВМФ.
В 1951 г. по инициативе военных инженеров М. М. Лобанова и А. И. Облезина для антенны станции П-8 было разработано новое мачтовое устройство высотой 30 м под названием "Унжа". С помощью этого устройства удалось прижать к земле угломестную ДНА станции и тем самым увеличить дальность обнаружения самолетов, летящих на средних высотах (не более 10 км), до 200-250 км, а на малых высотах - на 60-70 %. Оснащение РЛС П-8 двумя антенными системами позволило значительно расширить ТТХ этой станции. Высотная мачта "Унжа" впоследствии получила широкое применение в различной технике радиолокации и военной технике связи.
Мобильность и другие ТТХ станции П-8 создали определенные предпосылки для использования таких РЛС и в войсковой ПВО в составе радиолокационных постов (РЛП) раннего обнаружения воздушных целей и командных пунктов (КП) зенитных артиллерийских формирований.
ПодробнееМетровая РЛС дальнего обнаружения самолетов П-3А
Станция представляла собой модернизированную в конструктивно-технологическом отношении и размещенную на двух автомашинах РЛС П-3 с соответствующими этой станции ТТХ. После проведения государственных испытаний на НИЗАП ГАУ в 1947 г. (военный инженер-испытатель Г. Т. Опрышко) РЛС П-ЗА была принята на вооружение и поставлена на серийное производство взамен ранее выпускавшихся РЛС РУС-2, РУС-2с и П-3. Серийное производство П-3А было налажено с 1948 года на Нижегородском радиозаводе им. В.И. Ленина (в последствии ОАО "НИТЕЛ"). На Западе РЛС П-3А получила обозначение Dumbo.Каждая РЛС размещалась в двух кабинах на автомобильных шасси. В основу последующей разработки РЛС П-8 (обозначение НАТО Knife Rest A) взята РЛС П-3А.
Тактико-технические данные
Дальность обнаружения 120 км
Высота обнаружения 10 км
ПодробнееРЛС обнаружения самолетов и наведения авиации П-30
Станция предназначалась для использования в радиотехнических войсках ПВО страны, в ВВС и в береговых частях ПВО ВМФ. Эта станция затем стала также использоваться в радиолокационных ротах первых радиотехнических формирований (полков, батальонов) войсковой ПВО. В 1955 г. РЛС П-30 прошла государственные испытания на НИЗАП ГАУ и была принята на вооружение.Станция обеспечивала дальности обнаружения самолета-истребителя 170-180 км на высотах 8-12 км при импульсной мощности 1 МВт, чувствительности приемника 4х10'14 Вт, ширине ДНА по азимуту 4,5° и по углу места 0,6-1,7°. Станция состояла из индикаторной машины, прицепа с антенной системой и приемо-передающей аппаратурой, двух машин с агрегатами электропитания и прицепов для перевозки двух антенн. В отличие от РЛС П-20 в станции П-30 имелись УВЧ на лампе бегущей волны, более совершенная индикаторная аппаратура, аппаратура радиолинии трансляции радиолокационной информации "Фаза", было принято новое распределение рабочих частот по каналам, увеличены отражатели антенн, осуществлено сопряжение с системой опознавания и аппаратурой активного ответа "Глобус".
В 1958 г. РЛС П-30 была модернизирована на заводе № 37 ГКРЭ. РЛС П-ЗОМ ("Сатурн") в 1959 г. успешно прошла полигонные испытания и была принята на вооружение. Она обеспечивала повышенную на 10-15 % дальность обнаружения и была более удобна в эксплуатации
ПодробнееРЛС метрового диапазона Мост-2
Первой РЛС метрового диапазона, разработанной специально в качестве станции разведки и целеуказания для войсковой ЗА, была автомобильная радиолокационная станция кругового обзора с названием "Мост-2". К станции были предъявлены требования обеспечить дальность обнаружения самолетов до 140 км, точность определения азимута - 2°, дальности - 1 км, разрешающую способность по азимуту 20°. Станция работала с импульсной мощностью 80-100 кВт. Антенная система РЛС, состоящая из 4 "волновых каналов", расположенных попарно в двух горизонтальных плоскостях (этажах), размещалась на одном шасси с аппаратной кабиной. В станции были установлены передатчик, супергетеродинный приемник, ИКО и индикатор для определения угла места цели. Дальность и азимут определялись с помощью ИКО, Угол места и высота цели определялись методом переключения этажей антенны при работе на прием с помощью указанного индикатора угла места. Станция имела очень простую конструкцию и обладала хорошими эксплуатационными характеристиками. Еще в 1946 г. РЛС "Мост-2" успешно прошла испытания и была принята на вооружение войсковой ЗА, а также использовалась в ВВС.
ПодробнееПодвижная РЛС обнаружения сантиметрового диапазона "Тополь-1"
Первой подвижной РЛС обнаружения сантиметрового диапазона, которая предназначалась для использования в зенитной артиллерии и радиотехнических формированиях территориальной и войсковой ПВО, а также в ВВС для управления полетами самолетов, была станция кругового обзора "Тополь-1", разработанная ЦКБ-678 Министерства вооружения (главный конструктор станции Б. И. Иванов). В конце 1953 года - начале 1954-го станция проходила государственные испытания на Донгузском полигоне. Станция должна была обеспечивать дальность обнаружения среднего бомбардировщика не менее 150 км на высотах 4-15 км при импульсной мощности 1,5-1,7 МВт и ширине ДНА по азимуту 5,5°. Станция состояла из индикаторной машины, прицепа с антенной системой и приемо-передающей аппаратурой, двух машин с агрегатами электропитания и прицепа для перевозки антенной системы. Испытания станции были прекращены ввиду неудовлетворительной верхней границы зоны обнаружения, низкой эксплуатационной надежности, отсутствия защиты от активных и пассивных помех. Дальнейшая доработка РЛС "Тополь-1" не проводилась.
ПодробнееПодвижная РЛС кругового обзора "Тополь-2"
Одновременно с разработкой станции "Тополь-1" на конкурсных началах в НИИ-244 Министерства вооружения велась разработка подвижной РЛС кругового обзора "Тополь-2" (главный конструктор станции В. А. Сивцов), которая имела два независимых канала - обзорный (дальномерный) и угломестный (высотомерный). Станция должна была обеспечивать равную с "Тополем-1" дальность обнаружения, ошибки определения дальности - 500 м, азимута - 1° и высоты - 400- 500 м при импульсной мощности - 1,7 МВт, чувствительности приемников дальномера и высотомера - 82 дБ/Вт, ширине ДНА дальномера по азимуту - 1,15° и высотомера по углу места - 1,8°. РЛС состояла из индикаторной машины, прицепа с антенной системой, приемо-передающей аппаратурой дальномера и НРЗ, прицепа с антенной и аппаратурой высотомера, двух машин с агрегатами электропитания. Время развертывания "Тополя-2" в боевое положение составляло 1 ч 40 мин. Станция государственным испытаниям не подвергалась. На базе высотомерной части этой станции в дальнейшем был создан и принят на вооружение радиовысотомер ПРВ-10. Дальнейшие работы по дальномерной части РЛС "Тополь-2" были прекращены в связи с тем, что параллельно разработке этой РЛС в ОКБ-37 Министерства вооружения шло создание станции обнаружения (дальномера) П-30 ("Хрусталь") на основе модернизации ранее созданной по заказу ВВС и предназначенной для наведения истребительной авиации РЛС П-20.
Подробнее
Дополните и/или уточните материал.



rlock@mail.ru
| Название | Назначение | Разработчик | Изготовитель | Примечания |
| АРЛСК (1РЛ116, 5Н85, 36Ж6) | 3 к всевысотная | ГНИИРТ | Горьковский ТВ завод (АО "НИТЕЛ") |
Вестник ПВО |
| "Газетчик-Е" | защита от ПРР | ВНИИРТ | Вестник ПВО | |
| "Гамма-ДЕ" | 3-к обзорная | ВНИИРТ | Вестник ПВО | |
| "Гамма-С1Е" | 3-к обзорная | ВНИИРТ | Вестник ПВО | |
| РЛС 22Ж6 "Десна" | 3-к обзорная | ВНИИРТ | ПЗРА | Вестник ПВО |
| РЛС ПО 9С19М2 "Имбирь" | 3-к секторная | НИЭМИ | ММЗ | Вестник ПВО |
| РЛК Кабина-66 | 3-к обзорная | ВНИИРТ, КБ ПЗРА | ПЗРА | Страница "Невский бастион" |
| РЛС "Каста-2Е2" (39Н6Е) | обнаружение НЛЦ | ВНИИРТ | МЗРИП | Сервер МЗРИП |
| РЛС "Каста-2Е1" (51У6) | обнаружение НЛЦ | ВНИИРТ | МЗРИП | Сервер МЗРИП |
| РЛС "Машук" (5Н88) | 3-к обзорная | ВНИИРТ | Страница "Невский бастион" | |
| РЛС "Мост-2" | РЛС метрового диапазона | Вестник ПВО | ||
| РЛС "Небо" (55Ж6) | 3к РЛС | ГНИИРТ | Горьковский ТВ завод (АО "НИТЕЛ") |
Военный парад- Каталог |
| РЛС "Небо СВ" (1113-3-1) | РЛС дежурного режима | ГНИИРТ | Горьковский ТВ завод (АО "НИТЕЛ") |
Военный парад- Каталог |
| РЛС "Оборона 14" (5Н84А) | 2к РЛС | Военный парад- Каталог |
||
| РЛС П-3А | метровая РЛС дальнего обнаружения самолетов | НИИ радиопрома |
НИТЕЛ | Вестник ПВО |
| РЛС П-8 | РЛС дальнего обнаружения | НИИ радиопрома |
Вестник ПВО | |
| РЛС П-10 | ||||
| РЛС П-12 | ||||
| РЛС П-14 | РЛС дальнего обнаружения | НИТЕЛ | НИТЕЛ | Вестнмик ПВО |
| РЛС П-15 | ||||
| РЛС П-18 | ||||
| РЛС П-19 | ||||
| РЛС П-30 | РЛС обнаружения и наведения | Страница ЛЭМЗ | ||
| РЛС П-35 | 2-х коорд обзорная | ЛЭМЗ | ЛЭМЗ | Страница ЛЭМЗ |
| РЛС П-37 (1РЛ139) | радио- дальномер | ЛЭМЗ | Страница ЛЭМЗ | |
| РЛС П-40 "Броня" | РЛС ОНЦ | НИИИП | ЛЭМЗ | Вестник ПВО |
| РЛС П-80 "Алтай" | 3-к обзорная | ВНИИРТ | ПЗРА | |
| ПРВ-9 | радио высотомер |
ОКБ-588 МГСНХ | Вестник ПВО | |
| ПРВ-9А | радио высотомер |
ОКБ-588 МГСНХ, НИИ-208 ГКРЭ | Вестник ПВО | |
| ПРВ-11 | радио высотомер |
НИИ-244 | завод № 588 | Вестник ПВО |
| ПРВ-13 | радио высотомер |
Вестник ПВО | ||
| ПРВ-16 | радио высотомер |
Вестник ПВО | ||
| ПРВ-17 | радио высотомер |
|||
| РЛС "Противник-ГЕ" (59Н6-Е) | 3-к обзорная | ННИИ РТ | Газета МГУ 4-99 Вестник ПВО | |
| РЛС "Резонанс" | обнаружение малозаметных целей | НИИДАР-ВНИИРТ | ||
| РЛО 64Н6Е | обеспечение РЛ инф ПБУ С-300 | НИИ ИП | Военный парад'35 | |
| РЛС ЗРК "Оса-АКМ" | обнаружение НЛЦ | НИЭМИ | Ижевский ЭМЗ "Купол" | Сайт з-да "Купол" Вестник ПВО |
| РЛ обеспечение ЗРПК "Тунгуска" | обнаружение и сопро- вождение НЛЦ |
Вестник ПВО | ||
| РЛС 96Л6Е | 3-к обзорная | КБ "Лира" | ЛЭМЗ | Страница "Невский бастион" |
| РЛС КО 9С15МТЗ С-300В |
3-к обзорная | НИИ ИП | МЗРИП | Военный парад'35 Вестник ПВО |
| СОЦ ЗРК "Тор" | 3-к в секторе ответств | НИЭМИ | Вестник ПВО | |
| СНР ЗРК "Тор" | сопр. ВЦ и наведение ЗУР | НИЭМИ | Вестник ПВО | |
| "Струна" | обнаружение НЛЦ | Мини-институт ПРИНТ | Страница Мини- института ПРИНТ | |
| РЛС СТ-68УМ | 3-к, обнаружение НЛЦ | ВНИИРТ | Вестник ПВО | |
| РЛС С-300Ф | много- функцио- нальная | НПО "Альтаир" | Вестник ПВО | |
| РЛП ЗРПК "Панцирь-С1" |
Тульское КБ Приборо- строения | Вестник ПВО | ||
| РПЦ 5Н62В С-200 | подсвет ВЦ | ЦКБ "Алмаз" | Вестник ПВО | |
| Антенный пост ЗРК "Шквал" |
Вестник ПВО | |||
| СНР 9С32 С-300В | обнар. ВЦ и навед. ЗУР | НИЭМИ | ММЗ | Вестник ПВО |
| СНР 1С32 ЗРК "Круг" | обнар. ВЦ и навед. ЗУР | НИЭМИ | Вестник ПВО | |
| РЛС 1С12 ЗРК "Круг" | 2-к обзорная | НИИ ИП | ЛЭМЗ | Вестник ПВО |
| CОЦ 9С18М17 "Купол" ЗРК "Бук-М1Э" |
3-к обзорная | НИИ ИП | Военный парад'35 Вестник ПВО | |
| Станция 1С11 ЗРК "Куб" | 2-к обзорная | НИИП | Вестник ПВО | |
| РЛК "Телеспкоп-ВМ" | обнаружение НЛЦ | Электромаш | Электромаш | Вестник ПВО |
| РЛс "Тополь-1" | подвижная РЛС кругового обзора | ЦКБ-678 | Вестник ПВО | |
| РЛС "Тополь-2" | подвижная РЛС кругового обзора | НИИ-244 | Вестник ПВО | |
| РЛС 1С31 ЗРК "Куб" | сопр. ВЦ и навед. ЗУР | НИИП | Вестник ПВО | |
| РЛС 5Н56 "Шпага" | 3-к секторная РЛС | НИЭМИ | ||
| РЛС 16Ж6 | 3 к всевысотная | Вестник ПВО | ||
| РЛС 55Н66М | обнар НЛЦ | НПО "Утес" | НПО "Утес" | Вестник ПВО |
| РЛС 30Н6Е1(2) | РЛ подсвета и наведения | Оборо- нительные системы |
Автоматическая система обнаружения, измерения координат и распознавания воздушных, наземных и надводных объектов методом радиолокации на просвет "Струна"
Система защиты ответственных объектов, резиденций, аэропортов, акваторий портов, горных ущелий, узких проливов и т.д. от низколетящих воздушных объектов или их регистрацию для полицейских, пограничных, таможенных служб и служб безопасности.
Метод основан на использовании эффекта дифракции электромагнитного поля на объектах, находящихся между источником и приемной системой. Построение системы - многозвенное (до 10 звеньев).