Страница изменена 05.11.01
Теория
Содержание:
- а) самолетов, вертолетов, крылатых ракет над сушей и морем;
- б) надводных кораблей и состояния морской поверхности;
- в) плазменных неоднородностей в космическом пространстве и атмосфере, образованныхв том числе при запусках баллистических ракет.
- измерение дальности и угловых координат движущихся целей кораблей, самолетов, искусственных спутников Земли и т.д. (лазерные дальномеры, локаторы типа MCMS, PAIS и др.);
- высокоточные измерения скоростей перемещения целей и потоков жидкостей и газов (лазерные доплеровские измерители скоростей и анемометры);
- получение некоординатной информации о целях: параметров поверхности (шероховатости, кривизны), параметров вибрации и движения вокруг центра масс, изображений и др. (многофункциональные лазерные локаторы типа КА-98, Lotaws и др.);
- высокоточное наведение систем оружия (лазерные локаторы подсвета целей, обзора пространства и целераспределения);
- обеспечение стыковки космических аппаратов, посадки самолетов, судовождения (лазерные навигационные системы); е) элементы технического зрения в автоматических и роботизированных системах (системы измерения дальности, формирования изображения, селекции и распознавания целей и др.);
- диагностика параметров и измерение вариаций характеристик окружающей среды, включая атмосферу, а также контроль ее загрязнения продуктами хозяйственной деятельности человека (лидары типа DIAL и др.; Lidar - LIght Detection And Ranging - обнаружение света и определение дальности).
- http://www.ieee.org
- http://www.eecs.uic.edu/eecspeople/boerner2.htm
- http://national-academies.org/rap
- http://www.uwb.org
- http://carol.wins.uva.nl/~portegie/research/#overview
- http://www.darpa.mil
- http://www.uwb.freeservers.com/
- http://www.mineseeker.com/press-info/docs/dera/dera.html
Справочные сведения
Многопозиционность в радиолокации понимают
в различном смысле:
а) исходя из общего числа позиций;
б) исходя из
числа передающих позиций;
в) исходя из числа приемных
позиций.
На рисунке представлена простейшая разнесенная двухпозиционная система с одним передатчиком, который может быть помещен в любую из точек (1 или 2), и двумя приемниками в точках 1 и 2.
 Запаздывание принимаемого сигнала от цели по отношению к
зондирующему определяется в этом случае суммой расстояний от цели до
передатчика и до приемника. Фиксированному значению const
соответствует линия положения в виде эллипса на плоскости
или поверхность положения в виде эллипсоида вращения в пространстве.
Если прием обеспечивается на обеих позициях, может быть вычислена
разность запаздываний, характеризующая разность расстояний.
Постоянное значение последней соответствует линии положения на
плоскости в виде гиперболы или поверхности положения в
виде гиперболоида вращения. Положение единственной цели на плоскости
в наблюдаемом секторе можно определить, не измеряя ее угловые
координаты. В многоцелевых же ситуациях без их измерения трудно
обойтись из-за многочисленных пересечений линий
положения.
Запаздывание принимаемого сигнала от цели по отношению к
зондирующему определяется в этом случае суммой расстояний от цели до
передатчика и до приемника. Фиксированному значению const
соответствует линия положения в виде эллипса на плоскости
или поверхность положения в виде эллипсоида вращения в пространстве.
Если прием обеспечивается на обеих позициях, может быть вычислена
разность запаздываний, характеризующая разность расстояний.
Постоянное значение последней соответствует линии положения на
плоскости в виде гиперболы или поверхности положения в
виде гиперболоида вращения. Положение единственной цели на плоскости
в наблюдаемом секторе можно определить, не измеряя ее угловые
координаты. В многоцелевых же ситуациях без их измерения трудно
обойтись из-за многочисленных пересечений линий
положения.
При близком к 180о бистатическом угле (угле между направлениями от цели на передающую и приемную позиции) существенно возрастает интенсивность вторичного излучения, даже по целям со специально сниженной локационной заметностью. Поэтому многопозиционная радиолокационная система (МПРЛС) в виде цепочки бистатических РЛС может служить своеобразным барьером, предотвращающим пропуск целей.
Варианты МПРЛС
Они могут различаться:
степенью жесткости взаимного расположения позиций;
степенью
автономности работы аппаратуры на позициях;
уровнем объединения
добываемой на них информации.
Нежесткость взаимного расположения позиций проявляется, если в качестве хотя бы одной на них служат самолет, корабль, ракета, спутник Земли. Распространенный пример - полуактивное наведение ракеты на цель, когда цель подсвечивается с Земли, а приемное устройство головки самонаведения расположено на ракете.
Наряду с полностью автономной работой аппаратуры на позиции возможны ее частично автономная работа и кооперативная работа. Так, автономия может касаться лишь получения информации о целях, тогда как включение и выбор режимов работы основной части аппаратуры осуществляются с командного пункта, совмещенного с одной из позиций. Кооперативность приема отраженных сигналов состоит в использовании на различных позициях вторичного излучения цели, зондируемой с какой-либо одной позиции, что существенно расширяет возможности локационного наблюдения. Кооперативность излучения зондирующих сигналов состоит в проведении его с различных позиций последовательно или практически параллельно во времени.
Простейшая кооперативность приема это объединение выходной информации позиций об обнаруженных или предполагаемых целях. Устраняя провалы радиолокационного поля, такое объединение позволяет в случае перекрытия зон наблюдения РЛС повышать точность измерения координат, в первую очередь за счет сопоставления достаточно точно измеряемых значений времени запаздывания. Для сопоставления требуется отождествление данных, поступающих о разных целях с различных позиций.
Наряду с указанным возможно объединение значительно более полной, но и объемной информации о параметрах исходных видеочастотных или высокочастотных напряжений приемников (квадратурных составляющих или же амплитуд и фаз этих напряжений). Полный вектор скорости при многопозиционном приеме можно найти не только по результатам траекторной обработки, но в ряде случаев точнее по эффектам Доплера в различных точках приема. В МПРЛС расширяются возможности как адаптации к условиям работы, так и классификации целей. Использование телевизионного зондирования целей - интересный пример слияния многопозиционных систем локации и передачи информации.
Простейшие МПРЛС активной локации
Представляют собой совокупности автономно работающих однопозиционных РЛС, объединяемых ЭВМ и сравнительно узкополосными линиями связи. Выходная информация о наличии, координатах и признаках обнаруженных или предполагаемых целей помогает создать сплошное и эшелонированное по высоте радиолокационное поле. МПРЛС рассматриваемого вида могут органически вливаться в обслуживаемые ими системы управления с общими ЭВМ и линиями связи.
Простейшие МПРЛС активно-пассивной локации
Получаются из рассмотренных путем добавления на позициях каналов одномерной или двумерной пеленгации собственных излучений целей. Последующее объединение данных о пеленгах с помощью линий связи позволяет осуществить триангуляцию излучающих целей, т.е. оценить их пространственное положение при неработающих каналах активной локации. Недостатком пассивной части подобных МПРЛС является существенное снижение эффективности в многоцелевых ситуациях из-за обилия ложных пересечений (квазипересечений) пеленгов, особенно в условиях недостаточного углового разрешения. Повышение последнего (в том числе за счет адаптивных методов, и более совершенное отождествление могут улучшить положение.
Кооперативный прием собственных излучений целей
Будучи организован (хотя бы для двух позиций, удаленных на некоторую базу), расширяет возможности локации. Выявляя степень сходства (корреляции) принимаемых колебаний при совмещении их с различными взаимными задержками в такой корреляционно-базовой системе (подсистеме), можно определять с приемлемой точностью линии положения целей в виде гипербол на плоскости или поверхности положения в виде гиперболоидов вращения в пространстве, соответствующие разностям расстояний. Таким образом, использование простейшей разновидности кооперативного приема и объединения информации на уровне сигналов (особенно высокочастотных) расширяет возможности многопозиционной локации.
Недостатком неавтономных локационных
МПРЛС с кооперативным приемом и объединением информации на уровне
сигналов является их усложнение по сравнению с МПРЛС с автономным
получением информации на позициях. Однако вследствие повышения
требований к локации и совершенствования ее элементной базы
возрастает интерес и к достаточно сложным МПРЛС.
Базово-корреляционный метод в разностно-дальномерных системах
Одной из наиболее интересных реализаций многопозиционных систем является обнаружение координат излучающих объектов разостно-дальномерным методом. При этом не требуется непосредственно по отраженному сигналу определять дальность до цели и ее угловые координаты. Определение координат источника осуществляется по разности прихода сигналов на каждую из позиций, а сама разность прихода сигнала к одной позиции относительно другой определяется из положения максимума взаимно-корреляционной функции сигналов от этих позиций или разности прихода импульса до приемных пунктов
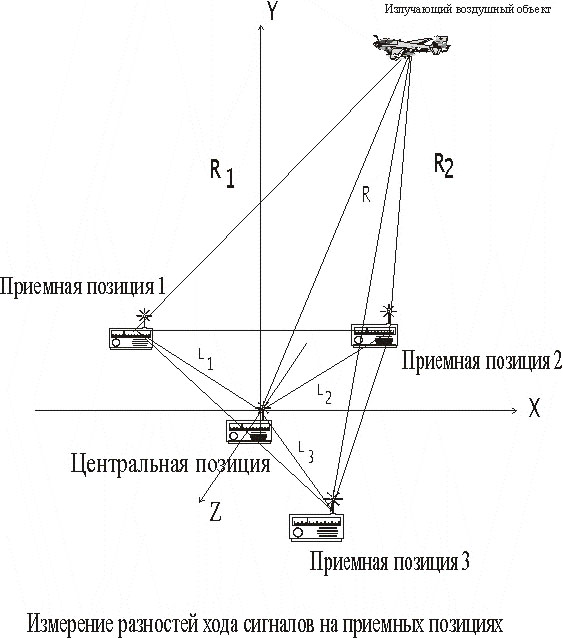
При вычислении взаимно-корреляционной функции сигналов от каждой пары позиций один из сигналов сдвигается во времени относительно другого до достижения максимума функции взаимной корреляции сигналов. Задержка, соответствующая максимуму, будет задержкой между приемом сигналов парой позиций или базой. Базово-корреляционный метод позволял получить точность измерения углов в несколько угловых минут - результат недостижимый для триангуляционных систем и активных РЛС. Ошибка определения угловых координат при таком методе определяется отношением ошибки измерения разности хода сигналов к длине базы. Ошибка измерения разности хода определяется отношением интервала корреляции сигнала (величины обратной полосе частот обрабатываемого сигнала) к пороговому отношению сигнал/помеха, возможности изменения которых в достаточной степени ограничены. В реальности ошибка измерения разности хода составляет порядка 5-10 м. Зато длина базы вполне может меняться и чем больше она будет, тем большие точности обеспечит метод. Так длина базы в 30 километров как раз и обеспечивает точности в 0,6 -1,2 угловых минут.
Пионером в реализации базово-корреляционной обработки былл Всесоюзный НИИ радиотехники (ВНИИРТ), входящий ныне в НПО "Скала". С 1961 года во ВНИИРТ начались работы по исследованию путей создания активно-пассивных радиолокационных систем, а в 1969 году ВНИИРТ приступил к созданию комплекса пассивной локации (КПЛ) "База", в котором впервые был реализован базово-корреляционный метод обнаружения излучающих объектов.
Система обнаружения ПВО Китая
Это практический или близкий к нему вариант реализации многопозиционной системы.
Осенью 1999 г разведка США заявила, что Китай близок к завершению работ по созданию подсистемы обнаружения для ПВО принципиально нового типа, основанной на излучении коммерческих станций. Больше никаких подробностей заявлено не было.
Подобные работы проводились и в СССР. Вот текст поступившего сообщения:
"У нас такие работы тоже велись.В ВИРТА (Харьков) на кафедре приемо-передающих устройств была такая НИР (названия не помню).В процессе НИР был разработан эскизный образец. Располагался он на академическом учебном центре близь г.Чугуева (Харьковская обл.).В качестве сигнала использовалось излучение Харьковского телецентра. Работы проводились по самолетам взлетающим с Харьковского аэропорта (пока самолеты там часто летали)."
Интересно сравнить, что получилось у китайцев и чем отличается от отечественных результатов.
Имеется также информация, что аналогичные работы проводились в США и Франции (см статью "Новые технические системы разведки воздушных целей"). Тут уже имеются некоторые характеристики, но на основные вопросы опять нет ответа. Кстати, ИТАР-ТАСС передавало, что "Локхид" даже сделал такую систему (надо полагать приемник), но не нашел на него покупателя и свернул исследования.
Живучесть разнесенных систем
Как известно ПВО Югославии частично укомплектована РЛС отечественного производства. Например, К-66. Результаты боевых действий оказались для излучающих средств ПВО просто плачевными. Как утверждали очевидцы, менее чем через минуту, после начала излучения, на станцию слеталось около трех десятков противорадиолокационных снарядов разных типов. Естественно, что под таким дождем уцелеть было мудрено.
Наши специалисты утверждают, что все активные РЛС у югославов выбиты, а остались только пассивные ("Тамара"). Хотя это вполне может быть преувеличением или протаскиванием собственных разработок, прислушаться к этому полезно. По сути дела, это первый опыт после Вьетнама длительного противостояния ПВО и массированных налетов. Видимо современные средства воздушного нападения в достаточной мере готовы к борьбе с традиционными совмещенными РЛС. Исходя из этого перспективные системы обнаружения должны для сохранения живучести в боевых условиях иметь разнесенные передающие и приемные позиции. Дорогостоящая аппаратура должна быть сосредоточена на приемной позиции. Эта позиция легче маскируется. Передающих позиций желательно иметь несколько и они должны быть недорогими. Основная трудность здесь в синхронизации работы приемника и передатчика при обзоре и необходимости иметь для этого широкополосные линии связи между позициями. Кроме того, желание получить максимальное значение ЭПР цели требует обеспечить значение бисттического угла близкое к 180 град. Эти ограничения приводят к небольшому разносу позиций и малой зоне обнаружения. По такому принципу построена "Струна".
Есть и более перспективные идеи, при которых синхронизация аппаратуры позиций вообще не понадобится.
Справочные сведения
Скрытые за горизонтом цели удается наблюдать с помощью радиолокаторов декаметрового диапазона волн (10...100 м, 3...30 МГц) и не удается, как правило, наблюдать на более коротких волнах. Волны декаметрового диапазона могут отражаться от ионосферы Земли и от ее поверхности, обеспечивая дальность скачкообразного распространения от 0,8 до 4 тыс. км при односкачковом и более 4 тыс. км при многоскачковом распространении. Дальность обнаружения движущихся целей, расположенных ниже ионосферы, от их высоты практически не зависит. Наряду со скачкообразным пространственным распространением декаметровых волн возможно их дифракционное поверхностное распространение, обеспечивающее дальности локации над морем 200...300 км. Загоризонтные РЛС предназначены для наблюдения:
По отношению к надгоризонтным загоризонтные РЛС характеризуются рядом особенностей. Так, условия распространения декаметровых волн существенно зависят от суточного, сезонного и т.п. текущего состояния ионосферы. В связи с этим, приходится систематически оптимизировать выбор рабочего поддиапазона частот. Существенно, что декаметровый диапазон загружен интенсивными излучениями связных и вещательных радиостанций. Выбор рабочего частотного канала приходится проводить поэтому из условия минимума помех в пределах оптимального поддиапазона. В силу больших рабочих длин волн 10...100 м приходится применять большие антенны порядка долей и единиц километров. Даже при этом условии согласованная азимутальная разрешающая способность составляет 1...10о, что обеспечивает низкую согласованную линейную разрешающую способность поперек линии визирования (50...500 км) на дальности 3000 км. Невысока и разрешающая способность вдоль линии визирования. Это связано с использованием сравнительно низких несущих частот и соответственно узких полос частот зондирующих сигналов. Известный интерес представляют поэтому методы адаптивной оптимизации разрешения. Чтобы обеспечить большие дальности действия при невысокой направленности излучения, приходится излучать зондирующие сигналы с большой энергией, мощностью и длительностью.
Для ослабления помех передатчика приему слабых отраженных сигналов используют разнос передающей и приемной позиций. Наряду с относительно малыми по сравнению с дальностью действия базами разноса (сотни километров) иногда создают базы порядка дальности действия. В этом случае используется прямое (в направлении распространения зондирующего сигнала) вторичное излучение целей. Интенсивность такого вторичного излучения повышается, когда цель приближается к линии базы.
Проблема эффективность - стоимость загоризонтных РЛС остается, тем не менее, открытой.
Использование
Вполне привычно и даже естественно, что ЗГ РЛС используются в СПРН, хотя и не от хорошей жизни. Все-таки таким образом можно засечь лишь факт старта. Однако имеются сведения и о несколько необычном использовании ЗГ РЛС. Наприимер, в Австралии для обнаружения надводных целей псле первого скачка. Интересно, что во времена СССР подобные ЗГ планировлось
развернуть на Украине (под Николаевым и рядом с Чернобылем) для локации Черного или Средиземного моря. Локация надводных объектов после первого скачка обещала иметь очень хорошее разрешение по скорости - влоть до шлюпок на расстоянии порядка 1000 км.
Справочные сведения
Активная оптическая локация.
Может проводиться с использованием некогерентных (прожекторных) и когерентных (лазерных) оптических сигналов.
Прожекторная локация.
Использовалась в период первой и второй мировых войн. Отраженные сигналы видимого диапазона наблюдались визуально. Прожекторы обеспечивали большую энергетику излучения, однако его некогерентность снижала возможности угловой концентрации. Прожекторы инфракрасного (ИК) диапазона используются в современных системах ночного видения, содержащих преобразователи ИК принятых изображений в видимые.
Лазерная локация.
Появилась в начале 60-х годов в результате создания источников оптического когерентного излучения лазеров. Лазерной локации присущ ряд важных особенностей.
Во-первых, когерентность и малая длина волны излучения лазеров позволили получать узкие диаграммы направленности (от единиц до десятков угловых секунд) даже при небольших размерах излучателей (единицы дециметров).При расходимости излучения, равной одной угловой секунде (при этом 1"~ 5х10-6pад), поперечный размер облучаемой области на дальности 200 км составляет 1 м, что позволяет раздельно наблюдать отдельные элементы цели.
Во-вторых, временная и пространственная когерентности излучения лазеров обеспечивают стабильность частоты при высокой спектральной плотности их мощности. Последнее, а также остронаправленность лазерного излучения обусловливают высокую помехозащищенность лазерных локационных средств от воздействия естественных источников излучения.
В-третьих, высокая частота колебаний приводит к большим доплеровским сдвигам частоты при взаимных перемещениях цели и локатора. Это обеспечивает высокую точность измерения радиальной скорости элементов цели, но требует расширения полосы приемных устройств.
В-четвертых, распространение волн оптического диапазона в газообразных и жидких средах сопровождается их значительным рассеянием. Это приводит к атмосферным помехам обратного рассеяния на входе приемного устройства и является, кроме того, демаскирующим фактором.
Структурная схема и особенности построения лазерного локатора.
Основным элементом передающего устройства является лазер. Спектральная линия излучения рабочего тела лазера определяет несущую частоту локатора.
В современной локации используются
лазеры:
а) на двуокиси углерода СО2 ;
б) на ионах неодима;
в) на рубине;
г)на
парах меди и др.
Газовые СO2-лазеры обладают высокими средними выходными мощностями (до десятков киловатт), высокой монохроматичностью (ширина спектра несколько килогерц), высоким кпд (до 20%), работают как в непрерывном, так и в импульсном режиме, компактны. Твердотельные неодимовые и рубиновые лазеры используются в основном в импульсном режиме (частота повторения 0,1...100 Гц); энергия их излучения в импульсе до единиц джоулей; кпд единицы процентов. Лазеры на парах меди обеспечивают высокую частоту повторения (до десятков килогерц) при средней мощности до 100 Вт.
Требуемое распределение потока зондирующего (лазерного) излучения в пространстве обеспечивается формирующей оптической системой (ФОС). В нее может входить система неуправляемых зеркал (З), линз и управляемых дефлекторов (Д), обеспечивающих перемещение луча. Отраженные от целей лазерные сигналы концентрируются приемным телескопом (ПРТ) на фотоприемных устройствах. Объединение передающей и приемной систем лазерных локаторов в отличие от РЛС используется редко из-за перегрузок фотоприемных устройств и нарастания уровня помех. Как передающая, так и приемная оптическая система перспективных лазерных локаторов выполняется в настоящее время в адаптивном варианте для компенсации искажений волновых фронтов сигналов в атмосфере и средах лазерных генераторов.
В фотоприемных устройствах лазерного локатора в отличие от РЛС практически не используют усиления сигналов на несущей частоте. При этом усложняется конструкция и затрудняется обзор пространства. Используется лишь прямое усиление видеосигналов, а при гетеродинном приеме - радиосигналов промежуточной частоты. Видеочастотное усиление используется преимущественно в видимом и ультрафиолетовом (УФ) диапазоне. Для этого диапазона имеются малошумящие приемники с внешним фотоэффектом (т.е. с выбиванием электронов квантами оптического излучения из фотокатода). Радиочастотное усиление используется в ИК диапазоне, в котором внешний фотоэффект не реализуется из-за недостаточной энергии кванта излучения, зато гетеродинный прием снижает значимость шумов внутреннего фотоэффекта.
Особенности гетеродинного приема. В состав фотоприемного устройства вводят лазерный гетеродин и смеситель в виде полупрозрачного зеркала или светоделительной призмы. При этом, в случае взаимной когерентности излучений лазерного гетеродина и передающего устройства, возможна когерентная обработка принимаемого сигнала. Поэтому гетеродинный прием используется не только для подавления внутренних шумов в ИК диапазоне, но и для извлечения информации из фазовой структуры принимаемого поля в видимом и УФ диапазоне.
Особенности интерферометрического приема. На входе фотоприемного устройства суммируют поля от двух или нескольких пространственно-разнесенных точек (областей) плоскости приемной апертуры. По результату интерференции полей определяют их взаимную когерентность и фазовые соотношения.
По набору измерений при различном разносе точек приема могут восстанавливать пространственное распределение амплитуды и фазы принимаемого поля. Интерферометрический прием используется в отсутствие гетеродина для извлечения информации из фазовой структуры принимаемого поля, а также для увеличения углового разрешения и синтезирования апертуры.
Области применения лазерных локаторов:
Полуактивная оптическая локация.
Использует явление вторичного излучения (отражения) целями оптических волн от источника естественного интенсивного первичного излучения. Чаще всего таким источником является Солнце. Средства полуактивной локации, основанные на этом принципе, называют оптико-электронными станциями. К средствам полуактивной оптической локации можно отнести также биологические зрительные системы. Пренебрегая фактором использования вторичного излучения, оптико-электронные станции часто относят к средствам пассивной оптической локации.
Пассивная оптическая локация.
Использует собственное оптическое излучение нагретых участков поверхности цели или ионизированных образований в ее окрестности. Известно, что максимум излучения абсолютно черного тела при температуре T (по Кельвину) приходится на длину волны ~ 2898/T мкм . Длина волны, на которую приходится максимум излучения реальных целей, обычно находится в инфракрасной области спектра (лишь при T ~4000 K максимум совпадает с красной, а при T ~5000 К - с желтой областью видимого спектра). Средства пассивной оптической локации обычно работают поэтому в ближнем ИК диапазоне. К подобным средствам относят ИК пеленгаторы, тепловизоры, тепловые головки самонаведения, пассивные приборы ночного видения и др. Они играют важную роль в системах предупреждения о ракетном нападении и противоракетной обороны.
Общие особенности оптической локации.
Определяются используемым диапазоном
частот. Высокая направленность зондирующего излучения и узкие поля
зрения приемных каналов существенно ограничивают возможности
оптических локационных средств по обзору пространства. Поэтому поиск
и обнаружение цели оптическими локационными средствами
осуществляются в большинстве случаев с использованием внешнего
целеуказания, для чего они сопрягаются с радиолокационными
системами. В процессе приема слабых сигналов проявляется квантовая
природа электромагнитных волн. Квантовые шумы сигнала ограничивают
чувствительность идеального оптического приемника в отсутствие помех
на уровне энергии хотя бы одного фотона [hf =(2,65 . . . 4,97) х
10-19Дж для видимого диапазона]. В оптическом диапазоне
облегчается получение некоординатной информации о цели, ее размерах,
форме, ориентации и т.д. При получении используют поляризационные и
фотометрические характеристики рассеянного излучения, регистрируют
изображение цели. Получение некоординатной информации часто является
основной задачей оптических локационных средств. Создание
преднамеренных помех для оптической локации возможно, но сложнее, чем для радиолокации.
Справочные сведения
Акустическая локация получила применение в водной среде, акустические волны в которой затухают существенно медленнее электромагнитных.
Пассивные акустические методы используют и в воздушной среде в неконтактных акустических взрывателях средств поражения. Еще ранее звукоулавливание и пеленгация объектов по создаваемым ими звукам (наряду с инфракрасной пассивной локацией) предшествовали радиолокации самолетов. Вынесенные акустические датчики могут использоваться в многопозиционных локационных системах совместно с электрическими средствами передачи информации. Наряду с акустическими колебаниями звуковых частот используют колебания более высоких, ультразвуковых частот и более низких, инфразвуковых. Инфразвуковые (сейсмические) колебания вызываются в толще суши, воды и атмосферы Земли землетрясениями, ураганами, а также взрывами и даже движением отдельных транспортных средств. Сейсмические волны могут распространяться в толще Земли со скоростью (0,1 . . . 14)х103 м/с и использоваться для обнаружения землетрясений, взрывов, геофизической разведки полезных ископаемых.
Ультразвуковую и звуковую активную и пассивную гидролокацию широко используют в морской навигации для обнаружения невидимых глазом подводных препятствий, в рыбном промысле для обнаружения косяков и крупных рыб, в гидрогеологии, океанографии для поиска полезных ископаемых и исследования морского дна, в военном деле для обнаружения и измерения координат подводных лодок, мин, надводных кораблей, наведения на них торпед и ракет. На акустические средства военного назначения распространяется идеология радиоэлектронной борьбы.
Особенности гидроакустических колебаний
Характерной особенностью является низкая скорость их распространения V ~1,5х103 м/с, значительно меньшая скорости света в вакууме C ~ 3х108 м/с. Это приводит к сокращению длин волн и обеспечению хороших разрешений по дальности активной локации даже при узких полосах частот. Хотя акустические колебания в воде затухают слабее электромагнитных, степень их затухания велика. Наименьшее затухание наблюдается в диапазоне звуковых частот 0,5...2 кГц. Дальность распространения волн средней интенсивности в одном направлении достигает при этом 15...20 км. В диапазоне ультразвуковых частот, больших 15...20 кГц, длина волны укорачивается и становится менее 10 см. Существенно возрастает затухание, особенно в поверхностном слое воды, содержащем ряд неоднородностей (пузырьков воздуха, микроорганизмов и т.д.). Дальность распространения волн средней интенсивности снижается до 3...5 км. Наряду с явлением затухания сказываются явления рефракции и сверхрефракции. Рассеяние акустических колебаний неоднородностями (явление реверберации) приводит к образованию непреднамеренных гидролокационных пассивных помех. Удары волн о поверхность суши, шумы перекатываемой гальки, всплески волн, звуки, создаваемые рыбами и другими морскими животными, источники непреднамеренных активных помех.
Пассивная гидролокация шумопеленгование.
Позволяет выявлять источники акустического излучения, классифицировать их, определять пеленги с точностью от десятых долей до 1...2о. Методы пеленгации сходны с радиотехническими. Индикация чаще всего слуховая. Устройства пассивной гидролокации устанавливаются на надводных судах и подводных лодках. Могут использоваться также прибрежные и донные гидрофоны (преобразователи гидроакустических колебаний в электрические). Распространена установка гидроакустических буев (поплавков). Информация снимается с помощью кабелей или по каналам радиосвязи, в том числе с использованием самолетов-ретрансляторов. Возможна многопозиционная корреляционная обработка поступающих сигналов
Активная гидролокация
Активный гидролокатор сходен по структуре с активным радиолокатором. Могут излучаться немодулированные или модулированные по фазе, например, частотно-модулированные импульсные или непрерывные колебания. Выбор рабочей частоты проводится из противоречивых требований: а) повышения направленности передачи и приема с увеличением частоты; б) снижения затухания гидроакустических волн с уменьшением частоты.
Для активной гидролокации требуются в любом случае достаточно интенсивные зондирующие сигналы. Несущие частоты гидролокационных станций (ГЛС) выбираются в связи с изложенным в пределах от единиц до десятков килогерц в зависимости от выбранной максимальной дальности. Мощности (средние и импульсные) лежат в пределах от сотен ватт до сотен киловатт. Преобразование электрических колебаний в механические и обратно проводится за счет прямого и обратного пьезоэффектов или же прямого и обратного магнитострикционных эффектов. Наряду с гидроакустическими антеннами зеркального (рефлекторного) и рупорного типов получили распространение соответствующие антенные решетки.
Максимальная дальность ГЛС составляет от нескольких единиц до нескольких десятков километров в зависимости от типа ГЛС и текущих параметров среды.
Наряду с другими гидроакустическими средствами ГЛС могут быть важной составной частью гидроакустических комплексов (систем) военного назначения, решающих задачи обнаружения, измерения и классификации целей с выдачей при необходимости информации для их поражения (или же передачи по подводной линии связи).
Широкое распространение получают рыболокаторы вертикального действия(до глубин 0,6 км) и горизонтального действия (до дальностей 0,5;2; 6 км). Разновидности ГЛС используются в морской геологии, а также обеспечивают подводные промыслы (наводят инструменты или трубы в скважины).
В интересах отдельных разновидностей
подводных работ созданы ГЛС бокового обзора с высоким разрешением (максимальная дальность 300 м
при несущей 0,3 МГц). Разрабатываются
ГЛС звуковидения со сверхвысоким разрешением (максимальная дальность 10...20 м при несущих 1...3
МГц).
Это сравнительно молодое направление в РЛ. Основное его отличие - использование очень короткого импульса (наносекунды) для зондирования. Причем используются как радиоимпульсы с заполнением, так и видеоимульсы. Такой импульс имеет малую протяженность в пространстве, которая измеряется единицами метров или даже меньше, и отражается от отдельных элементов конструкции цели по-разному. Это позволяет создать радиолокационный портрет цели и решать задачу распознавания вполне естественными методами. Недостатки метода связаны с его очевидными достоинствами. Короткий импульс требует широкой полосы пропускания и, следовательно, пропускает большую часть спектра помех.
Справочные данные
В настоящее время экспериментально получены сверхмощные микроволновые импульсы наносекундной длительности двух видов - видеоимпульс, не имеющий четко выраженной несущей частоты, и радиоимпульс с несущей частотой, на один - два порядка превышающей ширину спектра импульса.
Параметры радиоимпульсов
Мощные наносекундные радиоимпульсы Х-диапазона могут быть получены, в частности, в релятивистской лампе обратной волны . В Институте прикладной физики и Институте сильноточной электроники (г. Томск) создана установка, позволяющая получать радиоимпульсы с несущей частотой 10 ГГц, длительностью 5 нс (длина электромагнитного импульса в пространстве порядка 1,5 м) и эффективной мощностью порядка 0,5 ГВт, причем частота повторения импульсов достигала 100 Гц.
Генератор был испытан в составе радиолокатора на реке Обь. При испытаниях маленький самолет с эффективной площадью рассеяния порядка 1 м 2 был отчетливо виден на фоне острова на расстояниях порядка 100 км, разрешение по дальности составляло порядка 1 м.
Совершенствование технических характеристик релятивистской лампы обратной волны позволяет надеяться на увеличение мощности излучения до 1 ГВт. В то же время длительность импульса может быть снижена до 1 нс, что будет соответствовать разрешению по дальности порядка 30 см.
Параметры видеоимпульсов
Генераторы сверхмощных электромагнитных импульсов СВЧ-диапазона могут строиться не только по цепочке преобразования энергии; импульсный генератор - ТЕМ волна - вакуумный диод - пучок - излучение;. Так, например, волна напряжения высоковольтного генератора может быть эффективно преобразована в электромагнитную волну при прямом излучении специальной антенной. Характеристики такого импульса существенно отличаются от СВЧ-излучения электронного генератора отсутствием высокочастотного заполнения и относительно большой шириной спектра, которая примерно равна частотне колебания или обратна длительности импульса. Фактически импульс представляет собой одно-два колебания
Форма выходного видеоимпульса мощного наносекундного генератора
Разработки наносекундных высоковольтных генераторов явились развитием традиционной техники формирования, основанной на вырезании короткого импульса из более длинного с помощью обостряющего и срезающего газового разрядников (слайсер). При этом особое внимание уделялось созданию систем с перестраиваемыми параметрами: амплитудой, длительностью, формой импульса, а также допускающих работу в частотном режиме (с определенной частотой повторения импульсов).
С помощью таких устройств были получены импульсы длительностью 1 - 5 наносекунд (до 0.5 наносекунд) и выходной мощностью до 300 - 400 МВт (с перспективой увеличения до 1 ГВт) с частотой повторения до 100 Гц. При этом стабильность амплитуды импульсов была не хуже 2 - 3 процентов, а стабильность длительности - не менее 10 процентов. Следует отметить, что проблема стабильности амплитуды и длительности имеет первостепенное значение для моноимпульсной локации, так как в этом случае выделение подвижной цели с малым значением эффективной отражающей площади на фоне большой стационарной помехи осуществляется вычитанием последовательных импульсов отраженного излучения, поэтому изменение амплитуды и формы импульса может в принципе симулировать движение на самом деле неподвижной помехи. К тому же идея создания секционированной системы синхронных мощных наносекундных излучателей (на основе сверхмощных единичных элементов) для увеличения выходной мощности установки не представляется в настоящее время нереальной, а для этого также требуется высокая стабильность параметров импульсов от отдельных элементов. Методы формирования высоковольтных импульсов допускают параллельное секционирование наносекундных драйверов, являющихся основой наносекундных формирователей. Кроме того, исследования показывают, что точность управляемого запуска мощных модуляторов может составлять доли наносекунды. При этом стабильность параметров наносекундного генератора с пассивным излучателем (в частности, повторяемость спектральных характеристик от импульса к импульсу) полностью определяется характеристиками импульсов модулятора.
Для излучения наносекундных мощных видеоимпульсов могут быть использованы, например, ТЕМ-рупоры , выполненные в виде неоднородных полосковых линий. При этом выходная апертура может достигать величины (40 - 50)l 2, где l - средняя длина волны наносекундного видеоимпульса, что обеспечивает ширину главного лепестка диаграммы направленности порядка 10 градусов по уровню -6 дб.
Преимущества использования сверхкоротких мощных импульсов
Приведем аргументы, обосновывающие преимущества использования сверхкоротких мощных микроволновых импульсов в моноимпульсной локации.
1. Использование наносекундных импульсов обеспечит хорошее разрешение по дальности (порядка 1 м), что даст возможность обнаруживать и сопровождать движущиеся цели с малой эффективной площадью рассеяния на фоне больших стационарных помех.
2. Измерение скорости цели в традиционных радиолокационных станциях осуществляется по доплеровской модуляции частоты отраженного импульса. При этом если скорость достаточно велика, то ее определение осуществляется по одному лоцирующему импульсу. В этом случае есть некоторая минимальная скорость, которая может быть измерена данным способом. Для небольших скоростей применяется также доплеровская оценка по нескольким импульсам пачки. Однако в этом случае есть так называемые "слепые" скорости, когда фаза отраженного импульса меняется на целое число 2 p от импульса к импульсу, и цель кажется неподвижной. При определенных условиях таких слепых скоростей может быть достаточно много. При моноимпульсной локации мощными наносекундными импульсами эти проблемы полностью снимаются, так как благодаря высокому разрешению по дальности определение скорости цели происходит по наблюдению ее перемещения по координатам.
3. При указанном соотношении длительности импульса (5 нс) и длительности интервала между импульсами (около 0,01 с) проблемы мертвого времени, когда блокирован приемник радиолокационной станции, и невозможно получение информации о целях, практически не существует.
4. Так как при моноимпульсной локации определение всех параметров цели происходит по одному импульсу, то при частоте повторения импульсов в 100 Гц не возникает неоднозначности по дальности. Действительно, за время 0,01 с все эхо-импульсы успевают достигнуть приемной антенны, если максимальная дальность обнаружения не превышает 1500 км, что представляется более чем достаточным для современных радиолокационных установок.
5. Высокое разрешение по дальности позволяет проводить идентификацию целей по отраженному импульсу. Действительно, все детали объекта с размерами порядка 1 м2 (плоскости, винты и т. п.) будут работать как независимые отражатели, создавая "пространственный портрет" цели, что даст возможность классифицировать цели в режиме реального времени по созданным заранее образцам эхо-откликов.
6. Высокое разрешение по дальности может дать информацию о высоте низколетящего над относительно гладкой местностью объекта по временному разделению одиночного отклика и диффузного эхо-сигнала от подстилающей поверхности.
Кроме вышеперечисленного, следует отметить, что параметрами лоцирующего импульса можно относительно просто управлять, изменяя характеристики генератора. Более того, в стационарных радиолокационных установках, организованных по модульно-блочному принципу, может быть использована линейка стандартных генераторов, настроенных на разные частоты и с разными параметрами импульсов, что позволит оперативно изменять характеристики лоцирующих импульсов непосредственно в процессе работы станции.
Сайты, содержащие сведения о СШП РЛ:
Выскажите свое мнение по предложенным темам, дополните и/или уточните сведения, предложите свою тему.